/**
* �ߵ������������ 1.node���ǵ�һ���ڵ� 2.tryAcquire������ʧ����
* ������ж� �����ǰ�߳�����ʧ�ܣ��Ƿ���Ҫ����ǰ����߳�
*
* ����pred��ǰ���ڵ㣬 node���ǵ�ǰ�ڵ�
*/
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
// ǰ���ڵ��waitStatus
int ws = pred.waitStatus;
// ǰ���ڵ�ΪSIGNAL��-1��ֱ�ӷ���true����ʾ��ǰ�ڵ���Ա�ֱ�ӹ���
if (ws == Node.SIGNAL)
return true;
// ws>0 CANCEL ˵��ǰ���ڵ�ȡ�����Ŷ�
if (ws > 0) {
// �������ѭ����ʵ������������ȡ���Ľڵ㣬�ҵ���һ�������Ľڵ�
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
// ���ýڵ�ĺ��ָ��node������˫������
pred.next = node;
} else {
/*
* waitStatus must be 0 or PROPAGATE. Indicate that we
* need a signal, but don't park yet. Caller will need to
* retry to make sure it cannot acquire before parking.
* �ٷ�˵�����ߵ���waitStatusֻ����0��propagate��Ĭ������£������½ڵ����ʱ��waitStatus����Ϊ0
* ������CAS������ǰ���ڵ��waitStatusֵ����Ϊsignal
*/
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
// ����false�����Ż��ٽ���ѭ������ʱǰ���ڵ�Ϊsignal������true
return false;
}
���ǰ���ڵ��waitStatus�����������
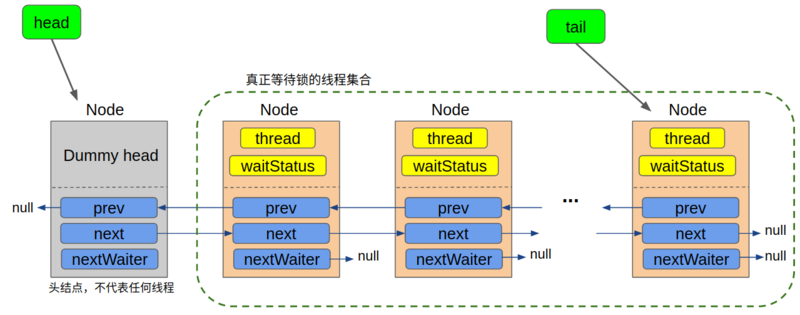
�ȴ�״̬����Ϊ Node.CONDITION ����Ϊ������ ConditonObject ��
- ws==-1����ΪNode.SIGNAL,��ʾ��ǰ�ڵ�node���Ա�ֱ�ӹ�����pred�߳��ͷ�ͬ��״̬ʱ�����node�߳̽��л��ѡ�
- ws > 0����ΪNode.CANCELLED��˵��ǰ���ڵ��Ѿ�ȡ�����Ŷӡ������dz�ʱ�������DZ��жϡ�������Ҫ�ҵ�ǰ��û��ȡ����ǰ���ڵ㣬һֱ�ң�ֱ���ҵ�Ϊֹ��
- ws == 0 or ws == Node.PROPAGATE��
- Ĭ������£������½ڵ����ʱ��waitStatus����Ϊ0����CAS������ǰ���ڵ��waitStatusֵ����Ϊsignal����һ�ν�����ʱ���ߵ��˵�һ����֧��
- ���ͷ�����ʱ�Ὣռ�����Ľڵ��ws״̬����Ϊ0��
PROPAGATE��ʾ����ģʽ�£�ǰ���ڵ㲻���ỽ�Ѻ�̽ڵ㣬ͬʱҲ���ܻỽ�Ѻ�̵ĺ�̡�
���ǿ��Է��֣���������ڵ�һ���߽�����ʱ���Dz��᷵��true�ġ�ԭ�����ڣ�����true������ʱǰ���ڵ��״̬ΪSIGNAL������һ�ε�ʱ��û�и�ǰ���ڵ�����SIGNAL�أ�ֻ����CAS������״̬֮�ڶ��ν����Ż᷵��true��
��SIGNAL�����嵽����ʲô�أ�
�������ã�������̡������ AQS CLH �� # Ϊʲô AQS ��Ҫһ������ head �ڵ�
waitStatus������ws��ƣ�ÿ���ڵ㶼��ws���������ڱ�ʾ�ýڵ��״̬����ʼ����ʱ��Ϊ0�������ȡ��Ϊ1��signalΪ-1��
���ij���ڵ��״̬��signal�ģ���ô�ڸýڵ��ͷ�����ʱ������Ҫ������һ���ڵ㡣
��ˣ�ÿ���ڵ�������֮ǰ�����û�н�ǰ���ڵ��ws����Ϊsignal����ô������Զ�������ѡ�
������ǻᷢ�����浱ǰ���ڵ��wsΪ0��propagate��ʱ����cas������ws����Ϊsignal��Ŀ�ľ�������һ���ڵ��ͷ�����ʱ���ܹ�֪ͨ�Լ���
boolean parkAndCheckInterrupt()
private final boolean parkAndCheckInterrupt() {
// ����ǰ�߳�
LockSupport.park(this);
return Thread.interrupted();
}
shouldParkAfterFailedAcquire��������true֮�ͻ���ø÷���������ǰ�̡߳�
LockSupport.park(this)����������߳�������;�������ѣ�1.��unpark() 2.��interrupt()��
��Ҫע�������Thread.interrupted()������жϱ��λ��
void cancelAcquire(node)
����tryAcquire��ȡ��ʧ�ܵ�ʱ���ߵ����������
private void cancelAcquire(Node node) {
// Ignore if node doesn't exist
if (node == null)
return;
// ���ڵ���߳��ÿ�
node.thread = null;
// �������е�ȡ���Ľڵ�
Node pred = node.prev;
while (pred.waitStatus > 0)
node.prev = pred = pred.prev;
// predNext is the apparent node to unsplice. CASes below will
// fail if not, in which case, we lost race vs another cancel
// or signal, so no further action is necessary.
// ������û�в���������£�preNext��node��һ�µ�
Node predNext = pred.next;
// Can use unconditional write instead of CAS here. ����ֱ��д��������CAS
// After this atomic step, other Nodes can skip past us.
// Before, we are free of interference from other threads.
// ����node�ڵ�Ϊȡ��״̬
node.waitStatus = Node.CANCELLED;
// ���nodeΪβ�ڵ��CAS��pred����Ϊ��β�ڵ�
if (node == tail && compareAndSetTail(node, pred)) {
// ���óɹ�֮��CAS��pred����һ���ڵ���Ϊ��
compareAndSetNext(pred, predNext, null);
} else {
// If successor needs signal, try to set pred's next-link
// so it will get one. Otherwise wake it up to propagate.
int ws;
if (pred != head && // pred�����ڵ�
((ws = pred.waitStatus) == Node.SIGNAL || // pred��wsΪSIGNAL �� ���Ա�CAS����ΪSIGNAL
(ws <= 0 && compareAndSetWaitStatus(pred, ws, Node.SIGNAL))) &&
pred.thread != null) { // pred�̷߳ǿ�
// ����node ����һ���ڵ�
Node next = node.next;
// node����һ���ڵ㲻��cancelled����cas����pred����һ���ڵ�Ϊnext
if (next != null && next.waitStatus <= 0)
compareAndSetNext(pred, predNext, next);
} else {
// �����������⣬���ߵ������֧������node����һ���ɻ��ѽڵ��߳�
unparkSuccessor(node);
}
node.next = node; // help GC
}
}
�ͷ���Դ
boolean release(int arg)
public final boolean release(int arg) {
if (tryRelease(arg)) { // ����ʵ��tryRelease����
// ��õ�ǰhead
Node h = head;
// head��Ϊnull����head�ĵȴ�״̬��Ϊ0
if (h != null && h.waitStatus != 0)
// ������һ�����Ա����ѵ��̣߳���һ����nextŶ
unparkSuccessor(h);
return true;
}
return false;
}
- tryRelease(int)��AQS�ṩ������ʵ�ֵĹ��ӷ�������������Զ���ʵ�ֶ�ռʽ�ͷ���Դ�ķ�ʽ���ͷųɹ�������true������false��
- unparkSuccessor(node)�������ڻ��ѵȴ���������һ�����Ա����ѵ��̣߳���һ������һ���ڵ�next��������������ȡ��״̬��
- head ��ws���벻����0��Ϊʲô�أ���һ���ڵ㳢�Թ����Լ�֮ǰ�����Ὣǰ�ýڵ����ó�SIGNAL -1�������ǵ�һ��������еĽڵ㣬�ڻ�ȡ��ʧ�ܺ�Ҳ�Ὣ����ڵ����õ� ws ���ó� SIGNAL��������ж�Ҳ�Ƿ�ֹ���߳��ظ��ͷţ�����������Ҳ�ܿ����ͷŵ�ʱ��ws����Ϊ0�IJ�����
void unparkSuccessor(Node node)
private void unparkSuccessor(Node node) {
/*
* If status is negative (i.e., possibly needing signal) try
* to clear in anticipation of signalling. It is OK if this
* fails or if status is changed by waiting thread.
*/
int ws = node.waitStatus;
// ���node��waitStatus<0Ϊsignal��CAS��Ϊ0
// �� head �ڵ�� ws �ij� 0������źš���ʾ�����Ѿ��ͷŹ��ˡ������ظ��ͷš�
if (ws < 0)
compareAndSetWaitStatus(node, ws, 0);
/*
* Thread to unpark is held in successor, which is normally
* just the next node. But if cancelled or apparently null,
* traverse backwards from tail to find the actual
* non-cancelled successor.
*/
// ���Ѻ�̽ڵ㣬�����п��ܺ�̽ڵ�ȡ���˵ȴ� �� waitStatus == 1
Node s = node.next;
// �����̽ڵ�Ϊ�ջ������Ѿ���������
if (s == null || s.waitStatus > 0) {
s = null;
// �Ӷ�β��ǰ�ң��ҵ�û��ûȡ�������нڵ�������ǰ��ġ�ֱ��tΪnull��t==node���˳�ѭ���
for (Node t = tail; t != null && t != node; t = t.prev)
// ���>0��ʾ�ڵ㱻ȡ���ˣ���һֱ��ǰ���£��ҵ�֮��return������һֱ��ǰ
if (t.waitStatus <= 0)
s = t;
}
// �����̽ڵ������û�б�ȡ�������ߵ��⣬ֱ�ӻ��Ѻ�̽ڵ㼴��
if (s != null)
LockSupport.unpark(s.thread);
}
�ο��Ķ�
- http://concurrent.redspider.group/article/02/11.html
- һ��һ��Դ��������AbstractQueuedSynchronizer
- ������ Java ���������C J.U.C ֮ AQS��ͬ��״̬�Ļ�ȡ���ͷ�