一、启动法
1:命令行启动clion
sudo gedit ~/.bashrc
#在bashrc文件中加入
export PATH="/home/gavyn/APPS/clion-2019.1.4/bin:$PATH" #地址根据自己改
#保存退出
source ~/.bashrc
#此时即可点击clion图标启动,也可以通过命令行启动,方法如下:
#在工作空间(例如:/home/gavyn/桌面/catkin_example)目录下打开终端,执行:
source devel/setup.bash
cd src
clion.sh
#关闭之前打开的工程,选择Import Project from Source,然后选择工作空间(catkin_ws)下的src目录,不要选择单个package目录。
法2:clion图标启动
编辑图标启动文件:
gedit ~/.local/share/applications/jetbrains-clion.desktop
文件里面可以看到,大概就是制定了快捷方式的图片,需要运行的命令,是否启动终端等配置。我们只需要在每次启动clion的时候加载一下bash(增加bash -i -c指令)就好了。所以将第六行改动一下,变成下面这个样子就好了。
[Desktop Entry]
Version=1.0
Type=Application
Name=CLion
Icon=/home/gavyn/APPS/clion-2019.1.4/bin/clion.svg
Exec=bash -i -c "/home/gavyn/APPS/clion-2019.1.4/bin/clion.sh" %f
Comment=A cross-platform IDE for C and C++
Categories=Development;IDE;
Terminal=false
StartupWMClass=jetbrains-clion
二、使编译过程中生成的文件位于build和devel文件夹下
默认情况下,CLion将构建输出放在自动创建的cmake-build-debug或cmake-build-release 目录中。对于ROS开发,这意味着您将在CLion和运行的控制台中拥有两个不同的版本catkin_make。
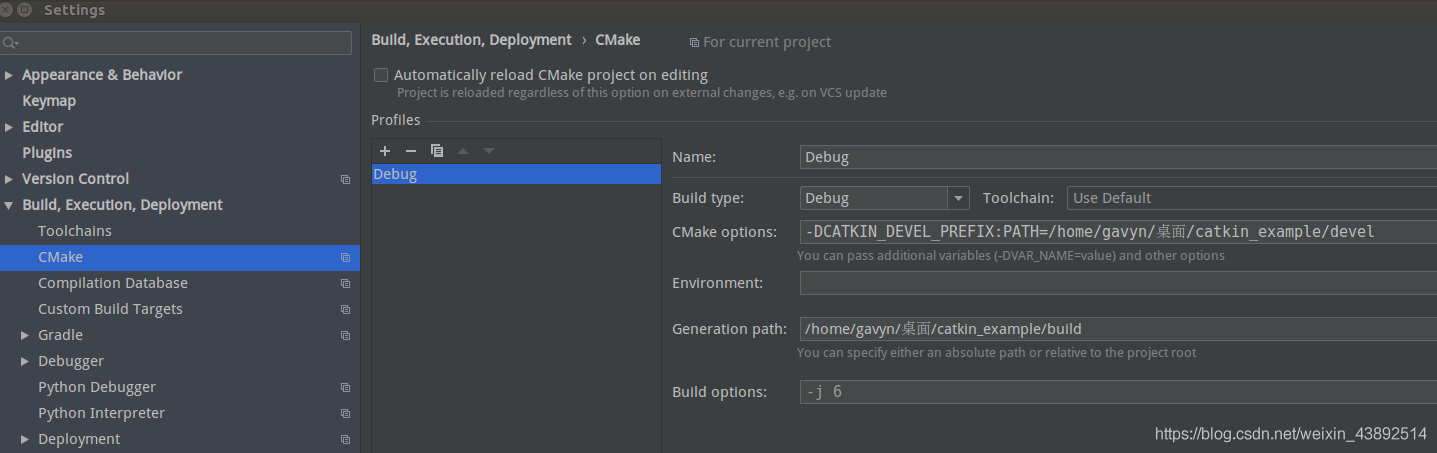
要在IDE和控制台上进行单一构建,需要将CLion构建路径设置为catkin工作区目录。为此,请转到 文件| 设置Ctrl+Alt+S| 构建,执行,部署| CMake并更改两个字段:
- 在生成路径中,设置workspace_folder/build。
- 在CMake选项中,添加-DCATKIN_DEVEL_PREFIX:PATH=workspace_folder/devel。
eg: 修改Settings->Build->CMake中的设置,将“CMake options”一栏修改为“-DCATKIN_DEVEL_PREFIX:PATH=/home/gavyn/桌面/catkin_example/devel”;将"Generation path"一栏修改为“/home/gavyn/桌面/catkin_example/build”。如下:
Reference
在Clion中配置ROS工程
clion中编译ROS
Clion ROS开发环境设置
总结
jsjbwy