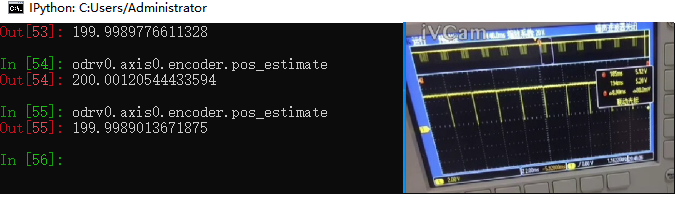
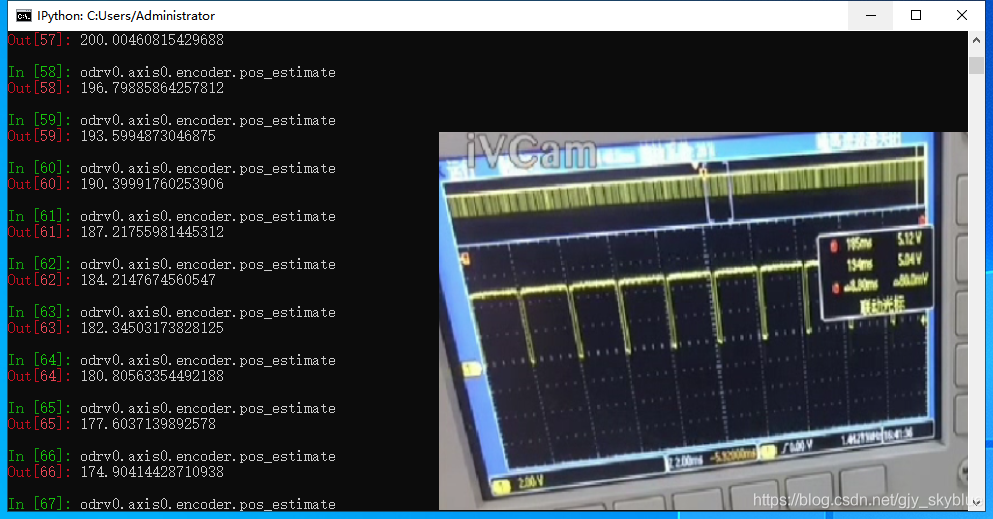
odrv0.axis0.encoder.pos_estimate
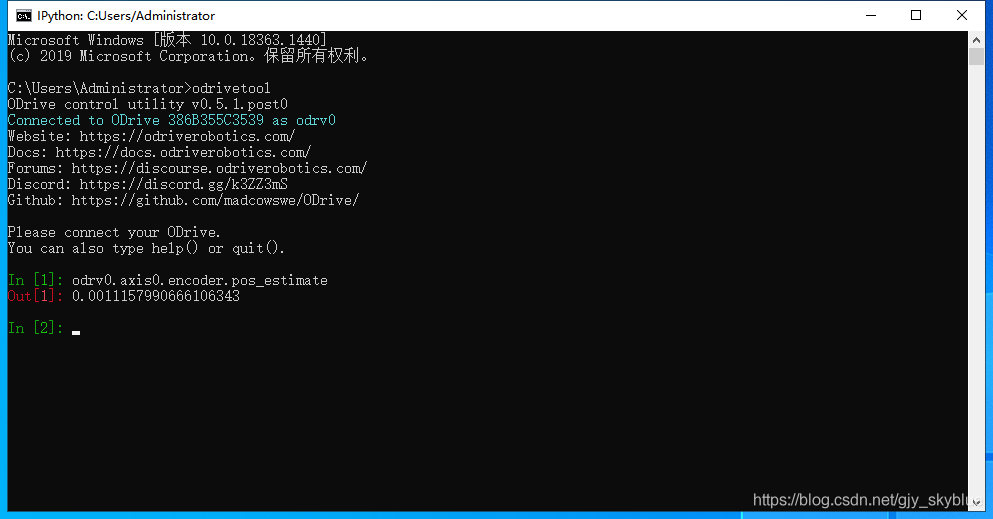
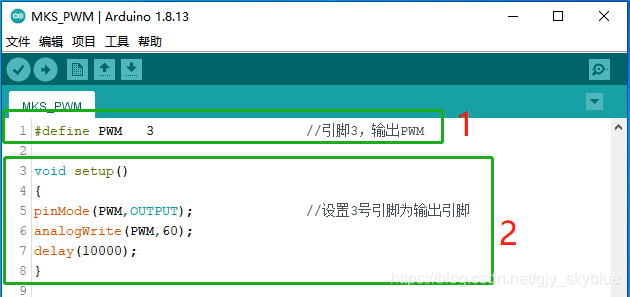
2. 当占空比<25%时,初始PWM=60(<25%)电机位置不改变。查询位置如下图所示。
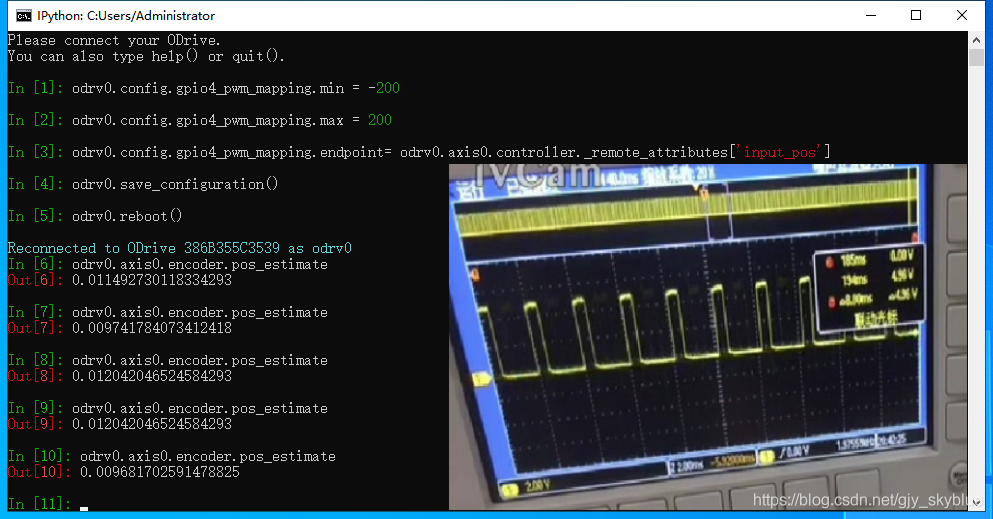
-
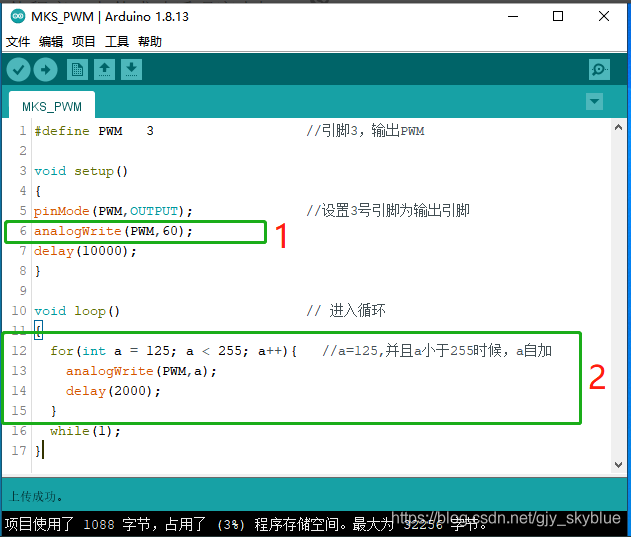
当25%≤占空比<50%时,设定PWM从125(<50%)开始变化电机会快速转至设定的最小值(min=-200),查询位置如下图所示。
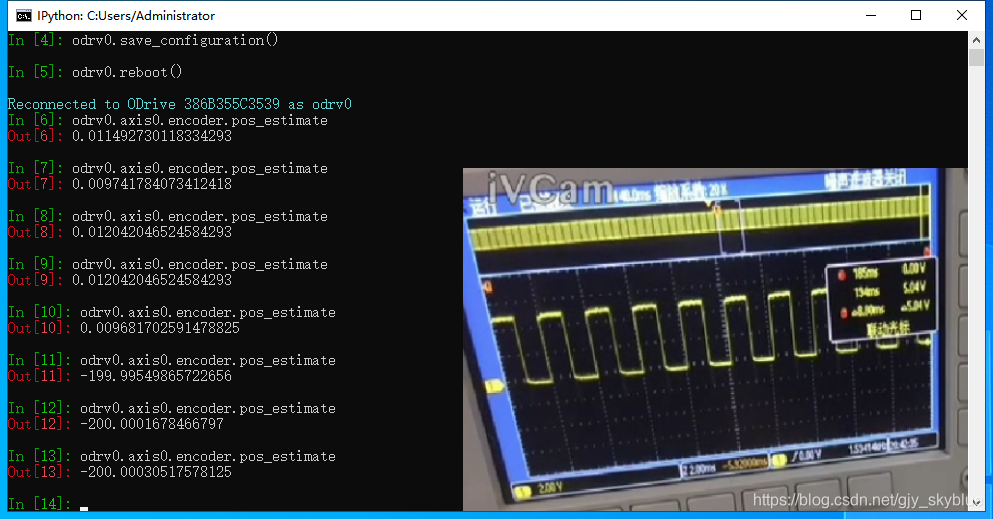
-
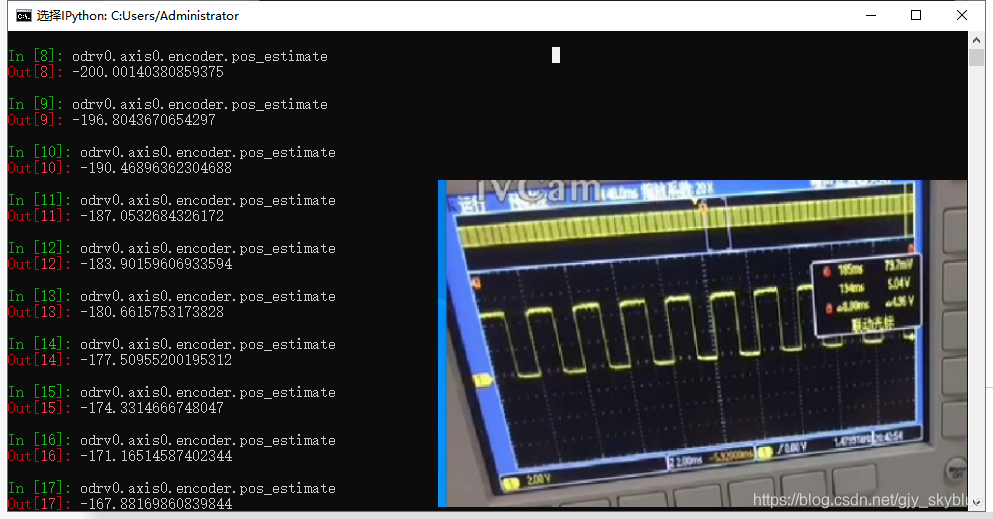
当50%≤占空比<100%时。
电机位置会从min→max每2秒正转一次,直到转至设定的最大值(max=200)。
查询位置如下图所示:
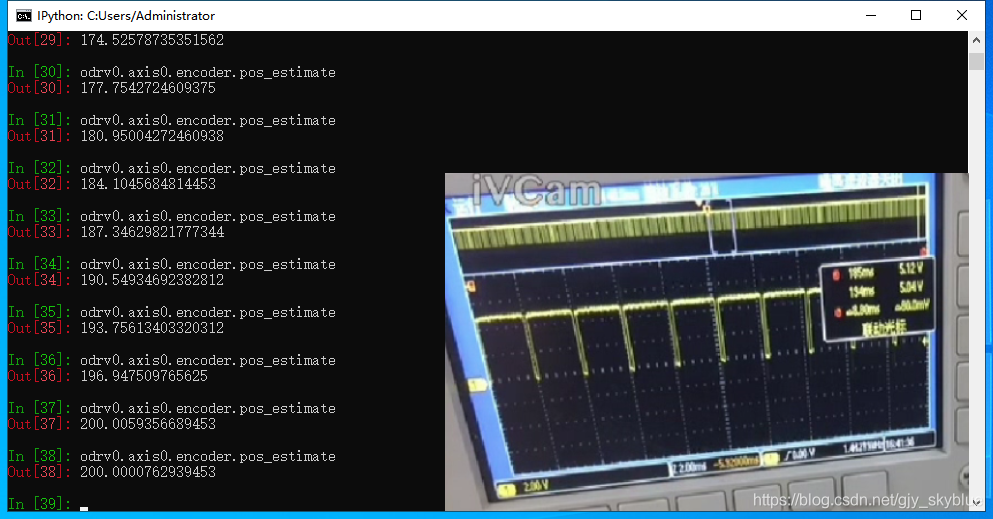
电机转至最大值(max=200)后停止,查询位置如下图所示:
第5部分 PWM占空比逐渐减小
PWM占空比逐渐减小,测试PWM映射电机位置的关系。
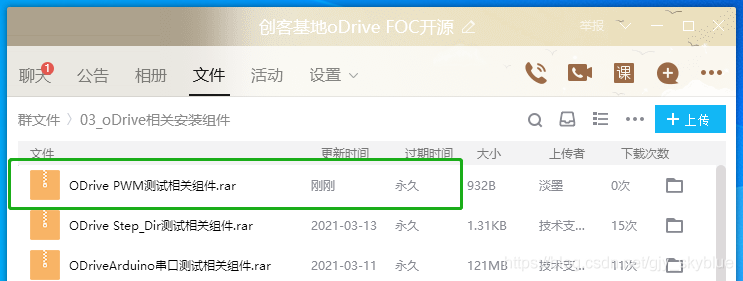
源代码在下载文件中,如下图所示。
5.1 设置占空比
1.将PWM占空比设置为从254→0每2秒减1,如图4所示。
- 上传程序,上传成功后观察电机。
5.2 观察电机
-
若重启ODrive主板,则电机初始位置为0。
-
电机会快速转至设定的最大值(max=200),查询位置如下图所示。
-
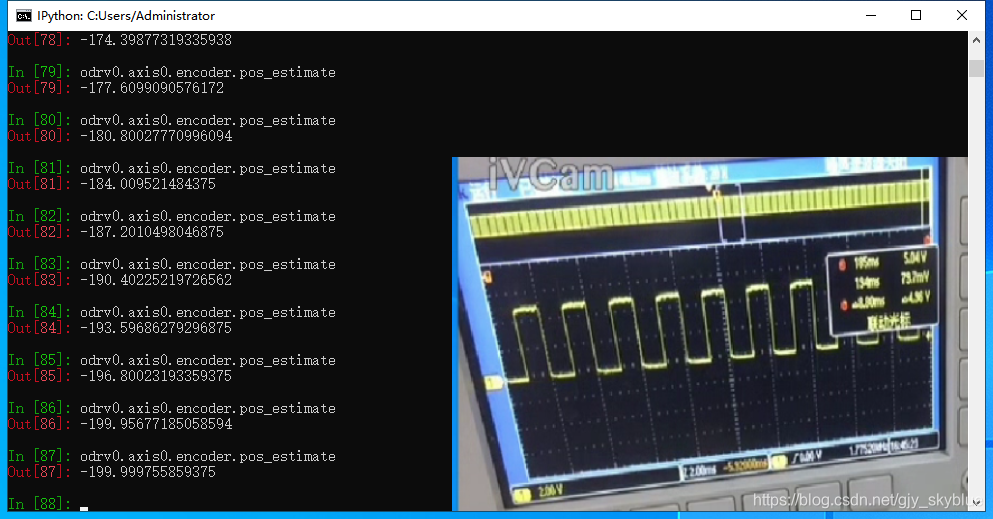
当50%≤占空比<100%时,电机位置会从max→min每2秒反转一次,直到转至设定的最小值(min=-200)。
位置逐渐减小,查询位置如下图所示:
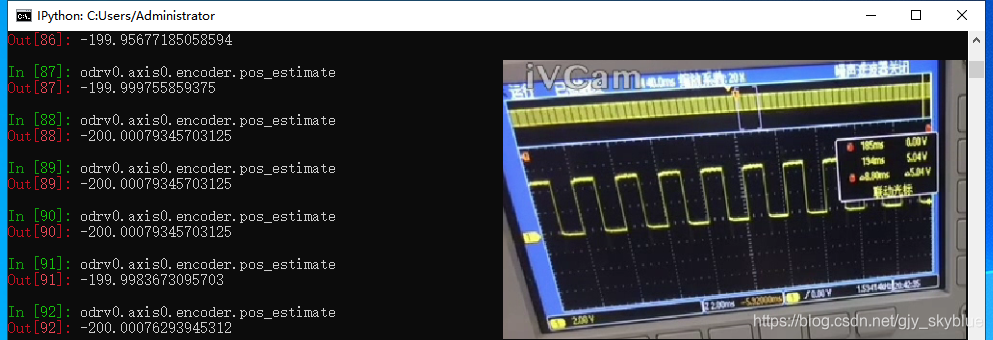
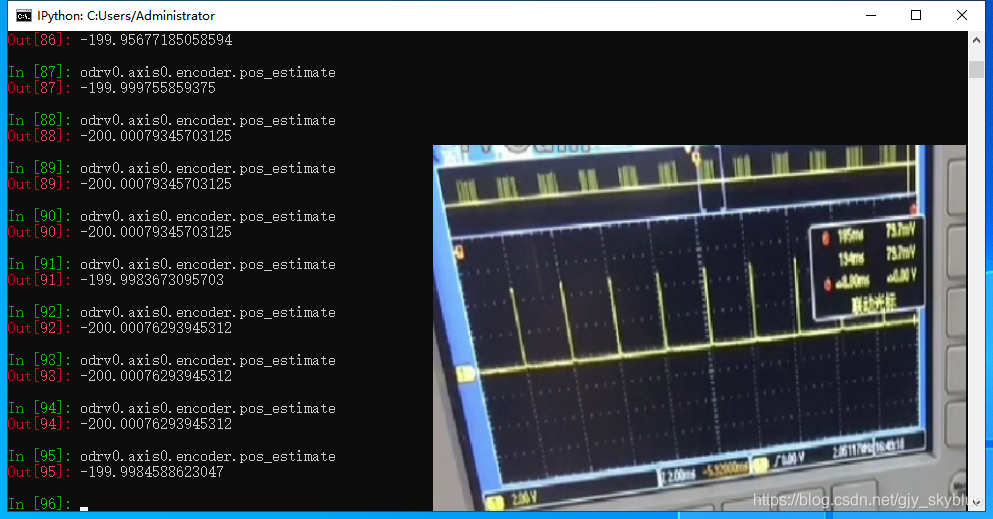
电机转至最小值(min=-200)后停止,查询位置如下图所示。
-
当25%≤占空比<50%时,电机位置处于设定的最小值(min=-200),查询位置如下图所示。
-
当0%≤占空比<25%时,电机位置不改变。
至此, ODrive PWM测试完成。
创客基地oDrive第八课 ODrive PWM测试 到此结束。
欢迎加入 创客基地 电机控制Q群 讨论电机控制相关问题:732557609
欢迎光临 创客基地 B站 了解技术资料:https://space.bilibili.com/393688975
欢迎光临 创客基地 淘宝店 采购产品:https://makerbase.taobao.com/
cs