??������ǰ��ReentrantLock-NonfairSyncԴ��������ȷ���(��)�з�����NonfairSync��ȡ���������̵߳������,Ҳ���Ƕ�����AQS�е�acquire����:
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
??��ǰ�����˽,addWaiter�����ὫThread��װ��һ��Node����,Ȼ��ͨ����ѭ��(����)+CAS�ķ�ʽ��֤nodeһ���ܹ���ӳɹ�,��ӳɹ�֮��᷵�ض�Ӧ��node,Ȼ������δ���acquireQueued������,�÷���ͬ��������AQS��:
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null;
failed = false;
return interrupted;
}
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
cancelAcquire(node);
}
}
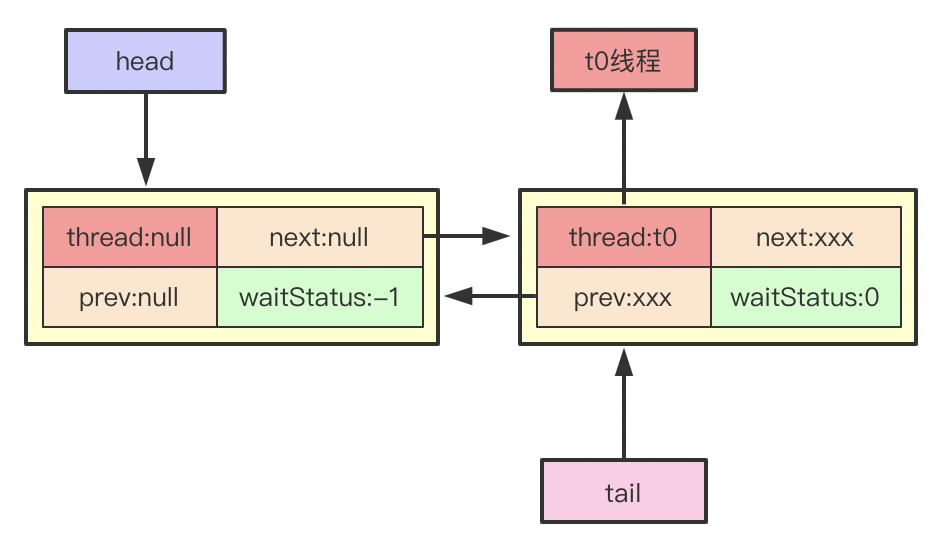
??����ͬ����������,���Ȼ��жϵ�ǰnode��ǰ���ڵ��Ƿ���head�ڵ�,�����,��ô��������������ǰnode�������߳�,�����ٴγ���ȥ��ȡ�����������ʲô��˼��?��ʵ�ܺ�����,��������������,�Ǿʹ�����ʱ���node��CLH�ĵ�һ����ʵ�Ŷӽڵ�,�����еĵڶ����ڵ�(headͷ�����һ���յ�Node),��ʱ�������Ѿ��������߳��ͷ���,��ô���������λ���߳���ʵ����Ҫ������,ֱ�ӻ�ȡ�������ˡ�����Ҳ�п��ܻ��ȡ��ʧ��,���������Ƿǹ�ƽ���ij���,��ʹnode�ǵ�һ���ŶӵĽڵ�,����ʱ����һ���µ��߳���������,�����Ƿǹ�ƽ��,��ô������Ϳ��ܱ�����������̻߳�ȡ,node������Ҫ�������������ȡ���ɹ�,��ô�ɹ��ڵ����Ҫ�����ӡ�,��������ij��Ӳ����������ij���,��ִ�еIJ�����:���ڵ��thread��prev�����ÿ�,��head�ڵ�����Ϊ��ǰ�ڵ�,����head�ڵ��nextָ��ϵ�������ԭ����������״̬(t0�Ѿ�������,head�ڵ��waitStatusΪSIGNAL):
??����t0�����ѻ�ȡ���ɹ�,��Ӧ��node��CLH"����"֮���״̬:
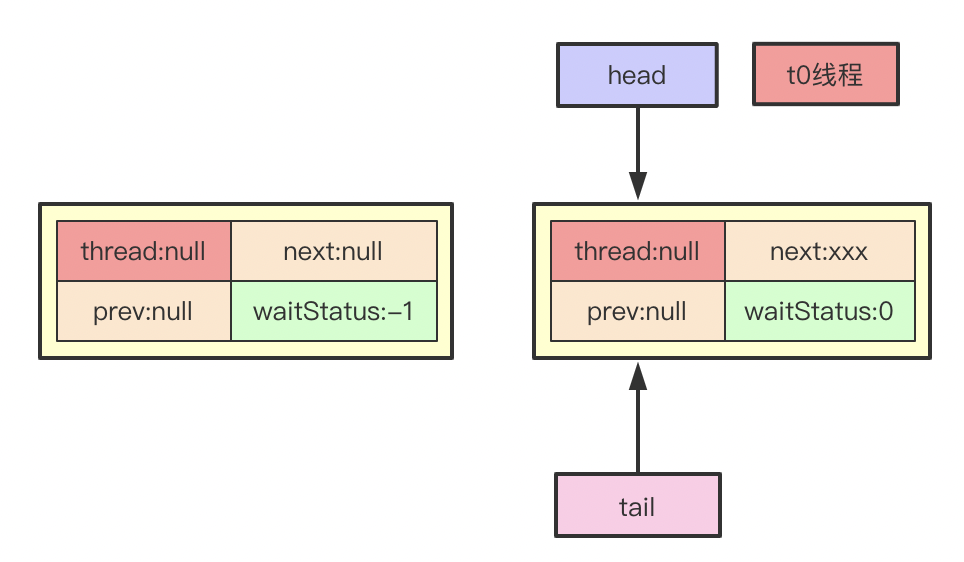
??���Կ���,node�ڵ㲢û����������,����ͨ��һϵ���ֶ��ÿպͶϿ�ָ�����,node�ڵ������µ�head�ڵ�,���ɵ�head�ڵ�����û������,�ᱻGC����������Ȼ,�����ȡ��ʧ��,��ô������Ҫ��������״̬��
??������������������,�����漰�������������ĵ���:shouldParkAfterFailedAcquire��parkAndCheckInterrupt���������������������true,��ô�Ὣinterrupted�ֶ�����Ϊtrue,Ȼ�������һ��ѭ������������shouldParkAfterFailedAcquire����,ע��÷������ô����pred������node�ڵ��ǰ���ڵ㡣
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
int ws = pred.waitStatus;
if (ws == Node.SIGNAL)
return true;
if (ws > 0) {
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
} else {
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
??�÷�����Ҫ�����waitStatus��һϵ�в���,����Node�����waitStatus�ֶ�,ǰ���ᵽ��,�䶨����4��ֵ:
-1 :SIGNAL:�ɱ�����
1:CANCELLED:��Ҫɾ��
-2:CONDITION:�����ȴ�
-3:PROPAGATE:����������
??��Ȼ����һ��Ĭ�ϵ�0ֵ,����1��-2��-3����ֵ,�ڱ����в���ȥ����,�������ܽ�����AQS���ʵ�ֵĹ���ʱ������̸,����ֻ��Ҫ��עĬ��ֵ0��-1����ʼ״̬ws��ֵΪĬ��ֵ0,��ô�����ߵ�CAS��waitStatus����,��ǰ������ws��ֵ��Ϊ-1,Ȼ�������������false(����ws����0,��ǰֻ������һ������0��ֵ,����CANCELLED,���IJ�������,���������������ڴ�����Ҳ������ע��,�Ͳ��ٶ���~)��
??shouldParkAfterFailedAcquire��������false֮��,�����ŵ�parkAndCheckInterrupt����Ҳ�Ͳ���ִ��,��ô��acquireQueued�����л������һ��ѭ��,�������Ǿ��Ȳ�����node�����Ŷӽڵ�����,���ٴν���shouldParkAfterFailedAcquire��������,ֻ�Ǵ�ʱǰ���ڵ��ws��ֵ����-1,ws == Node.SIGNAL����true,��ô���������ʱ�ͻ᷵��true����ô�ͻ����ִ��parkAndCheckInterrupt����,�÷����ܼ�,��������:
private final boolean parkAndCheckInterrupt() {
LockSupport.park(this);
return Thread.interrupted();
}
??ͨ��LockSupport.park����ʵ�����̵߳��������������й��ڷ��ص�ǰ�߳��ж�״̬����������ʱ����,������������˼��shouldParkAfterFailedAcquire��parkAndCheckInterrupt������������������ǰ��ķ���,shouldParkAfterFailedAcquire��ִ������(������pread==head���һ�ȡ���ɹ������,��ʱ�ڵ㲻��������),��һ�ν�node��ǰ���ڵ��waitStatus����ΪSIGNAL(-1),��������false,�ڶ����жϵ�waitStatus����-1,��������true,��������parkAndCheckInterrupt����ͨ��park����������������node�ڵ��ǰ���ڵ��waitStatus��ȡֵӰ��node�ڵ��Ƿ�����park����,��������������ʱ��̸,��֪����ô���¶�,�����ǿ����ͷ�������֮���ٻع�ͷ������
??�����ھ�����ReentrantLock��unlock����:
public void unlock() {
sync.release(1);
}
??���õ���AQS��release����:
public final boolean release(int arg) {
if (tryRelease(arg)) {
Node h = head;
if (h != null && h.waitStatus != 0)
unparkSuccessor(h);
return true;
}
return false;
}
??�÷����IJ������ͷ���ֵ��ʾ�ͷ����Ƿ�ɹ�,�Ȳ���ʧ�ܵ����,ֱ�ӿ���tryReleaes���������ʵ�ֵġ��÷�����AQS��Ҳ��һ���շ���,����ʵ����������,�������ǿ���ReentrantLock���е�ʵ��(Sync):
protected final boolean tryRelease(int releases) {
int c = getState() - releases;
if (Thread.currentThread() != getExclusiveOwnerThread())
throw new IllegalMonitorStateException();
boolean free = false;
if (c == 0) {
free = true;
setExclusiveOwnerThread(null);
}
setState(c);
return free;
}
??���ͷŵ����ܼ�,�������е�ע�;���,���ﲻ�����������������ͷųɹ�,���ص�freeΪtrue,��ô����Ҫִ�������̵߳Ļ��Ѷ���:
if (tryRelease(arg)) {
Node h = head;
if (h != null && h.waitStatus != 0)
unparkSuccessor(h);
return true;
}
??�ͷ����ͻ��������߳���Ȼ���ɳ����̴߳���,�����������Ƕ����Ķ���,���մ���������,����������ͬʱ����,�ж����ݾ���waitStatus�ֶΡ���Ӧ��ǰ���ᵽ��,�߳�������֮ǰ,��������ѭ��,��һ�λ��Ȱ�ǰ���ڵ��waitStatus��ΪSIGNAL(-1),Ȼ��ڶ��βŻ����parkAndCheckInterrupt��������������ע��������߳��Ǵ�CLH��ͷ��㿪ʼ����,������Ҫ�ж�head��waitStatus�ֶ��Ƿ�ΪĬ��ֵ0,����״̬��ʾt0�߳̿��Գ��Ա�����:

??��ʱhead�ڵ��waitStatus==-1,��ô���Խ���unparkSuccessor�������Ի����������߳�,�÷���ͬ��������AQS��:
private void unparkSuccessor(Node node) {
int ws = node.waitStatus;
if (ws < 0)
compareAndSetWaitStatus(node, ws, 0);
Node s = node.next;
if (s == null || s.waitStatus > 0) {
s = null;
for (Node t = tail; t != null && t != node; t = t.prev)
if (t.waitStatus <= 0)
s = t;
}
if (s != null)
LockSupport.unpark(s.thread);
}
??ǰ���������shouldParkAfterFailedAcquire�������ж�ӦCANCELLED�ڵ���Ƴ���,����Ҳ��ʱ���ÿ���̫��,ֻ��Ҫ֪�������ҵ���һ����Ҫ�����ѵ��߳�,Ȼ��ͨ��unpark�������份��,�����ﱻ���ѵĽڵ����head�ڵ�ĺ����ڵ㡣
??��ô����Ӧ�������̱߳�����֮����?���ǻص��߳������Ĵ����:
private final boolean parkAndCheckInterrupt() {
LockSupport.park(this);
return Thread.interrupted();
}
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
if (p == head && tryAcquire(arg)) {
setHead(node);
p.next = null;