In [2]: odrv0.axis0.motor.config.phase_inductance
Out[2]: 1.408751450071577e-05
In [3]: odrv0.axis0.motor.config.phase_resistance
Out[3]: 0.029788672924041748
某些电动机的相电阻和电感将与此相差很大。例如,万向节电机,一些小型电机(例如,峰值电流<10A)。如果您认为这适用于您,请尝试使用odrivetool将config.resistance_calib_max_voltage从其默认值1增加,然后重复电机校准过程。如果电动机的峰值电流消耗较小(例如,<20A),则也可以尝试将config.calibration_current从其默认值10A减小 。
一般来说,您需要
resistance_calib_max_voltage > calibration_current * phase_resistance
resistance_calib_max_voltage < 0.5 * vbus_voltage
ERROR_PHASE_INDUCTANCE_OUT_OF_RANGE — 0x00000002
原因:测得的电动机相电感超出合理范围。详情请参阅PHASE_RESISTANCE_OUT_OF_RANGE
ERROR_ADC_FAILED — 0x00000004
没有说明
ERROR_DRV_FAULT — 0x00000008
原因:栅极驱动器芯片报告错误。
已知ODrive v3.4存在硬件问题,当向M0施加大电流时,电动机将停止运行。在这种情况下,两个电动机的报告错误为ERROR_DRV_FAULT。
推测是,高开关电流会在DRV8301栅极驱动器芯片的电源中产生较大的纹波,从而导致其欠压故障检测。
要解决此问题,您可以将M0电流限制为40A。在一台测试电动机上观察到DRV故障的最低电流为45A,另一台测试电动机为50A。请参阅 此帖子 以获取有关硬件修复的说明。
ERROR_CONTROL_DEADLINE_MISSED — 0x00000010
没有说明
ERROR_NOT_IMPLEMENTED_MOTOR_TYPE — 0x00000020
没有说明
ERROR_BRAKE_CURRENT_OUT_OF_RANGE — 0x00000040
没有说明
ERROR_MODULATION_MAGNITUDE — 0x00000080
原因:母线电压不足以推动所需的电流通过电动机。如果在电动机校准过程中遇到此问题,请确保 config.resistance_calib_max_voltage不超过母线电压的一半。
对于万向电机,建议将config.calibration_current和config.current_lim设置为 总线电压的一半或更低。
ERROR_BRAKE_DEADTIME_VIOLATION — 0x00000100
没有说明
ERROR_UNEXPECTED_TIMER_CALLBACK — 0x00000200
没有说明
ERROR_CURRENT_SENSE_SATURATION — 0x00000400
原因:相电流超出可测量范围。
电流检测电路使电流检测放大器饱和。这可能是由于将config.current_lim设置为高于 config.requested_current_range造成的。如果发生这种情况,请增加请求的电流范围,保存配置,然后重新启动控制器。
最大允许电流和可测量电流范围之间默认有10%的余量。这通常就足够了,但是在某些情况下,您可能需要更多的余量。您可以简单地减少current_lim一点,也可以增加requested_current_range。如果仍然有requested_current_range比30%高的current_lim问题,则当前控制器中可能存在不稳定问题。
ERROR_CURRENT_LIMIT_VIOLATION — 0x00001000
原因:
电机电流超过motor.config.current_lim + motor.config.current_lim_margin。电流控制器是一个 PI 控制器,所以它会经历过冲。PI 增益是根据config.current_control_bandwidth以及电机电阻和电感(极点位置)自动计算的。一些过冲是正常的,所以如果您的电流限制很大,一个明智的解决方案是增加电流限制裕度。
ERROR_BRAKE_DUTY_CYCLE_NAN — 0x00002000
没有说明
ERROR_DC_BUS_OVER_REGEN_CURRENT — 0x00004000
原因:电机热敏电阻测得的温度高于 motor.motor_thermistor.config.temp_limit_upper
ERROR_DC_BUS_OVER_CURRENT — 0x00008000
原因:过多的电流从电源中输出.
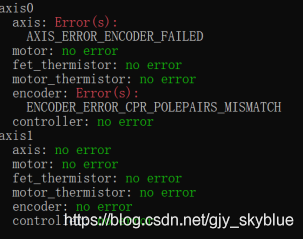
2.轴错误标志
ERROR_NONE — 0x00000000
没有说明
?ERROR_INVALID_STATE — 0x00000001
请求了无效的状态。
您试图在允许之前运行状态。通常,您在校准电动机之前尝试运行编码器校准或闭环控制,或者在校准编码器之前尝试运行闭环控制。
ERROR_DC_BUS_UNDER_VOLTAGE — 0x00000002
直流电压低于config.dc_bus_undervoltage_trip_level中配置的限制。
确认电源线已牢固连接。对于初始测试,可以提供几个安培的12V PSU应该足够,而使用低电流“壁式疣”插头包可能会导致行为不一致,因此不建议这样做。
您可以通过输入odrivetool中的liveplotter来监视PSU电压start_liveplotter(lambda: [odrv0.vbus_voltage])。如果看到 电压下降到config.dc_bus_undervoltage_trip_level以下(默认值:?8V),则将触发此错误。即使是相对较小的电动机也可以瞬间消耗数kW的电能,因此,除非您的PSU非常大或正在使用电池,否则在执行具有高电流限制的高速运动时可能会遇到此错误。要限制您的PSU功耗,您可以限制电动机电流和/或速度限制controller.config.vel_limit和 motor.config.current_lim。
ERROR_DC_BUS_OVER_VOLTAGE — 0x00000004
直流电压超过了config.dc_bus_overvoltage_trip_level中配置的限制。
确认您已正确连接了正确电阻值的制动电阻器,并且已将config.brake_resistance设置为制动电阻器的值。
您可以通过输入odrivetool中的liveplotter来监视PSU电压start_liveplotter(lambda: [odrv0.vbus_voltage])。如果在移动过程中看到电压升高到PSU的标称设定电压之上,则说明制动电阻设置得太低。如果您使用长导线或小规格导线将制动电阻器连接到odrive,则可能会发生这种情况,这会增加额外的电阻。需要考虑这个额外的电阻,以防止出现电压尖峰。如果已检查所有连接,还可以尝试将制动电阻一次增加?0.01欧姆,最大比制动电阻值大0.05。
ERROR_CURRENT_MEASUREMENT_TIMEOUT — 0x00000008
没有说明
ERROR_BRAKE_RESISTOR_DISARMED — 0x00000010
制动电阻器意外撤防。
ERROR_MOTOR_DISARMED — 0x00000020
电机意外撤防。
ERROR_MOTOR_FAILED — 0x00000040
检查motor.error以获取更多信息。
ERROR_SENSORLESS_ESTIMATOR_FAILED — 0x00000080
没有说明
ERROR_ENCODER_FAILED — 0x00000100
有关更多信息,请检查encoder.error。
ERROR_CONTROLLER_FAILED — 0x00000200
没有说明
ERROR_POS_CTRL_DURING_SENSORLESS — 0x00000400
没有说明
ERROR_WATCHDOG_TIMER_EXPIRED — 0x00000800
没有说明
ERROR_MIN_ENDSTOP_PRESSED — 0x00001000
没有说明
ERROR_MAX_ENDSTOP_PRESSED — 0x00002000
没有说明
ERROR_ESTOP_REQUESTED — 0x00004000
没有说明
ERROR_HOMING_WITHOUT_ENDSTOP — 0x00020000
在归位期间未启用最小终点挡块
ERROR_OVER_TEMP — 0x00040000
检查fet_thermistor.error和motor_thermistor.error以获取更多信息。
3.编码器错误标志
ERROR_NONE — 0x00000000
没有说明
ERROR_UNSTABLE_GAIN — 0x00000001
没有说明
ERROR_CPR_POLEPAIRS_MISMATCH — 0x00000002
确认您为编码器输入了正确的每转计数 (CPR) 。ODrive 使用您提供的电机极对值来测量 CPR。所以你也应该仔细检查这个值。
如果您仍然遇到问题,您可以尝试将 config.calib_scan_distance增加到默认值的 4 倍。
如果您的编码器 cpr 和电机极对设置正确,则可能导致此错误,因为电机齿槽会导致电机运动比指令少或多。您可以通过增加config.calib_scan_distance来解决这个问题 。
请注意,AMT 编码器可使用编码器 PCB 上的微动开关进行配置,因此您可能需要检查它们是否处于正确位置。如果您的编码器列出其每转脉冲 (PPR),则将该数字乘以 4 即可获得 CPR。
ERROR_NO_RESPONSE — 0x00000004
确认您的编码器已插入 ODrive 板上的正确引脚。
ERROR_UNSUPPORTED_ENCODER_MODE — 0x00000008
没有说明
ERROR_ILLEGAL_HALL_STATE — 0x00000010
霍尔效应编码器只有 8 (2^3) 个可能状态中的 6 个有效状态。无效状态可能由噪声或硬件故障引起。如果出现此错误并且您确定电气连接正确,请在编码器 A、B、Z 引脚和地之间添加 22nF 电容器以滤除噪声。
ERROR_INDEX_NOT_FOUND_YET — 0x00000020
检查您的编码器是否是具有索引脉冲的型号。如果您的编码器没有连接到 ODrive 上的引脚 Z 的电线,则它不会输出索引脉冲。
ERROR_ABS_SPI_TIMEOUT — 0x00000040
没有说明
ERROR_ABS_SPI_COM_FAIL — 0x00000080
没有说明
ERROR_ABS_SPI_NOT_READY — 0x00000100
没有说明
ERROR_HALL_NOT_CALIBRATED_YET — 0x00000200
没有说明
4.控制器错误标志
ERROR_NONE — 0x00000000
没有说明
ERROR_OVERSPEED — 0x00000001
超出电机速度config.vel_limit * config.vel_limit_tolerance并启用config.enable_overspeed_error。
尝试增加config.vel_limit。每秒 2 圈的默认设置使电机速度仅为 120 RPM。注意:即使您不命令电机超过config.vel_limit,电机负载的突然变化也可能导致暂时超过此速度,从而导致此错误。
您也可以尝试增加config.vel_limit_tolerance。默认值 1.2 意味着它只允许违反速度限制的 20%。您可以将config.enable_overspeed_error设置为 False 以禁用此错误。
ERROR_INVALID_INPUT_MODE — 0x00000002
该config.input_mode设置被设置为无效值。有关可用值,请参阅 InputMode
输入模式和控制模式是不同的概念。控制模式设置要使用的控制类型,如位置、速度或扭矩控制。输入模式修改给定的输入(input_pos等)以提供所需的行为。例如,在位置控制模式下,位置过滤器输入模式将平滑input_pos命令以提供更平滑的运动。
ERROR_UNSTABLE_GAIN — 0x00000004
没有说明
ERROR_INVALID_MIRROR_AXIS — 0x00000008
没有说明
ERROR_INVALID_LOAD_ENCODER — 0x00000010
没有说明
ERROR_INVALID_ESTIMATE — 0x00000020
没有说明
ERROR_INVALID_CIRCULAR_RANGE — 0x00000040
没有说明
ERROR_SPINOUT_DETECTED — 0x00000080
电机机械功率和电气功率不符。这通常是由打滑的编码器或不正确的编码器偏移校准引起的。检查您的编码器是否在电机上打滑。如果使用索引引脚,请检查您是否收到由噪声引起的错误索引脉冲。如果您对编码器信号使用非屏蔽电缆,就会发生这种情况。
cs