�������趼֮ǰ��������,ר��:stm32���ʵսָ����
����ʹ��STM32CubeMX������������??��������һ�¡�
һ��GPIO���
STM32F4 �� IO �������������ó����� 8 ��ģʽ�е��κ�һ��:
1�� ���븡��
2�� ��������
3�� ��������
4�� ģ������
5�� ��©���
6�� �������
7�� ����ʽ���ù���
8�� ��©ʽ���ù���
��ϸ�ο�:STM32���� �C GPIO���
���� ��غ���
1��HAL_GPIO_Init ����
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
��һ������:����ָ����Ҫ��ʼ����GPIO��Ӧ��GPIO��,ȡֵ��Χ��GPIOA ~ GPIOK��
�ڶ�������:Ϊ��ʼ�������ṹ��ָ��,�ṹ������Ϊ GPIO_InitTypeDef ��
typedef struct
{
uint32_t Pin;
uint32_t Mode;
uint32_t Pull;
uint32_t Speed;
uint32_t Alternate;
}GPIO_InitTypeDef;
��ʼ�� GPIO �ij��ø�ʽ��:
GPIO_InitTypeDef GPIO_Initure;
GPIO_Initure.Pin=GPIO_PIN_0;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP;
GPIO_Initure.Pull=GPIO_PULLUP;
GPIO_Initure.Speed=GPIO_SPEED_HIGH;
HAL_GPIO_Init(GPIOB,&GPIO_Initure);
����������˼������ PB0 �˿�Ϊ�������ģʽ, ����ٶ�Ϊ����,������
2��HAL_GPIO_TogglePin����
void HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
�ú�����ͨ������ ODR �Ĵ���,�ﵽȡ�� IO �������ƽ�Ĺ��ܡ�
3��HAL_GPIO_WritePin ����
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin,
GPIO_PinState PinState);
�ú�����������һ��IO���е�һ�����߶��IO�ڵĵ�ƽ״̬��
ʾ��:
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5,GPIO_PIN_SET); //PB5 �����
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5, GPIO_PIN_RESET); //PB5 �����
4��HAL_GPIO_ReadPin ����
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
����ֵ:IO�ڵ�ƽ״̬
�ú���������ȡһ��IO��һ�����߶��IO�ڵ�ƽ״̬��
ʾ��:
HAL_GPIO_ReadPin(GPIOF, GPIO_PIN_5);//��ȡ PF5 �������ƽ
����STM32CubeMX ���� IO ������
1������
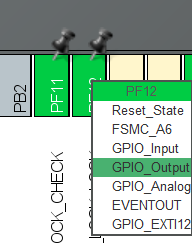
��STM32CubeMX����,������ͼ��ѡ��Ҫ���õ�IO�ڡ�
��������ѡ��PF12��
���� Configuration->GPIO,�ڵ����Ľ������� IO �ڵ���ϸ������
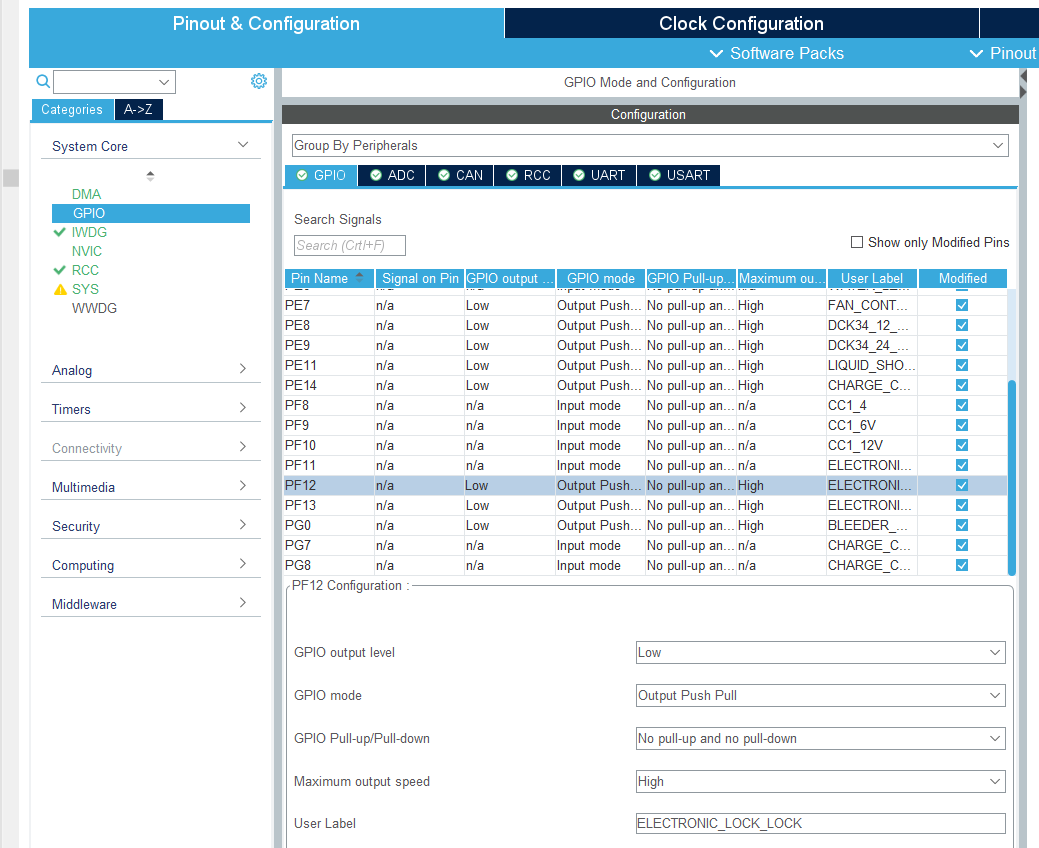
�������������ν�����Щ������ĺ���:
1)GPIO output level:
��������IO�ڳ�ʼ����ƽ״̬ΪHigh(�ߵ�ƽ)����Low(�͵�ƽ)��
2)GPIO mode:
�����������ģʽΪ Output Push Pull(����)����Output Open Drain(��©)��
3)GPIO Pull-up/Pull-down:
��������IO��������/����/û����������
4)Maximum output speed:
������������ٶ�Ϊ����(High)/����(Fast)/����(Medium)/����(Low)��
5)User Lable:
�������ó�ʼ����IO��PinֵΪ�����Զ���ĺꡣ
2������Դ��
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOF_CLK_ENABLE();
HAL_GPIO_WritePin(GPIOF, ELECTRONIC_LOCK_LOCK_Pin|ELECTRONIC_LOCK_UNLOCK_Pin, GPIO_PIN_RESET);
GPIO_InitStruct.Pin = ELECTRONIC_LOCK_LOCK_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOF, &GPIO_InitStruct);
}
cs