首先回顾一下均值漂移的思路:
在高维空间所有样本点中任选一个P作为起点,在每一维度中,以常量r为半径,查找半径范围之内的所有点,将这些点的每一维坐标求平均值,得到新的点P‘。如此反复迭代,当达到精度要求后退出循环,此时P达到均值处。
为了便于理解,可以做个类比:一个质量分布不均匀的物体,求其质心的过程,就可以看作是一次均值漂移,只不过它将所有点作为查找对象,一次查找就能确定质心,而均值漂移算法每次选取部分点,逐渐逼近“质心”。
下面用pcl实现三维样本点的均值漂移:
(完整代码在文末)
首先尝试对平面点做均值漂移。
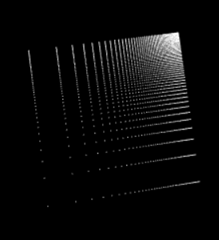
为了实现样本点的不均匀分布,这里用了ln()函数值来构造散点坐标:
for (int y = 0; y < a; ++y) {
for (int x = 0; x < a; ++x) {
cloud->points[y*a + x].x = log(x + 1) * 5;
cloud->points[y*a + x].y = log(y + 1) * 5;
cloud->points[y*a + x].z = 0;
cloud->points[y*a + x].r = 255;
cloud->points[y*a + x].g = 255;
cloud->points[y*a + x].b = 255;
}
}
构造出的正方形如下图:(x,y越大的地方越密集)
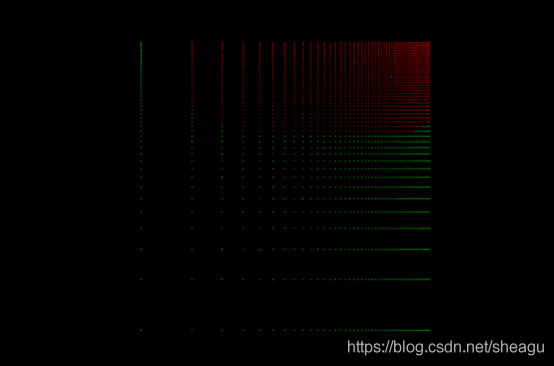
接下来为了便于色彩对比,将初始颜色改成绿色。
使用kd树进行邻近点查找:(将查找到的点赋为红色,这样可以看出中心点的移动趋势)
do {
cloud->points[pp] = temp;
cout << "Neighbors within radius search at (" << temp.x << " " << temp.y << " " << temp.z << ") with radius=" << radius << endl;
float sum_x = 0, sum_y = 0, sum_z = 0;
if (kdtree.radiusSearch(temp, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
{
for (size_t i = 0; i < pointIdxRadiusSearch.size(); ++i) {
cloud->points[pointIdxRadiusSearch[i]].r = 255;
cloud->points[pointIdxRadiusSearch[i]].g = 0;
cloud->points[pointIdxRadiusSearch[i]].b = 0;
sum_x += cloud->points[pointIdxRadiusSearch[i]].x;
sum_y += cloud->points[pointIdxRadiusSearch[i]].y;
sum_z += cloud->points[pointIdxRadiusSearch[i]].z;
cout << "point " << i + 1 << ": " << sqrt(pointRadiusSquaredDistance[i]) << endl;
}
float disx = sum_x / pointIdxRadiusSearch.size(), disy = sum_y / pointIdxRadiusSearch.size(), disz = sum_z / pointIdxRadiusSearch.size();
distance = sqrt(pow((disx-temp.x),2) + pow((disy-temp.y),2) + pow((disz-temp.z),2));
temp.x = disx;
temp.y = disy;
temp.z = disz;
count++;
cout << "distance " << count << " = " << distance << endl;
}
else break;
} while (distance > delta);
最终查找效果:(红色终止于最密集处)
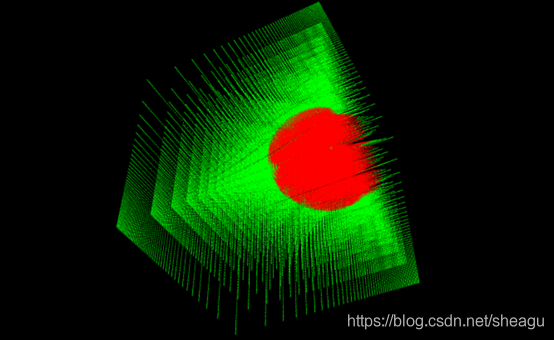
在此基础上进行三维均值漂移:
只需要对z坐标赋值即可。
下图是进行11次迭代后,达到点( 17.4077, 16.9699, 17.2516 )的效果:

完整代码(三维):
#include <iostream>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include<ctime>
#include<cstdlib>
#include <pcl/kdtree/kdtree_flann.h>
#include<cmath>
using namespace std;
int main() {
typedef pcl::PointXYZRGB Point6;
typedef pcl::PointCloud<Point6> Cloud6;
Cloud6::Ptr cloud(new Cloud6);
int a = 50;
int num = a*a*a;
cloud->width = num;
cloud->height = 1;
cloud->is_dense = false;
cloud->points.resize(cloud->width*cloud->height);
for (int z = 0; z < a; ++z) {
for (int y = 0; y < a; ++y) {
for (int x = 0; x < a; ++x) {
cloud->points[z*a*a + y*a + x].x = log(x + 1) * 5;
cloud->points[z*a*a + y*a + x].y = log(y + 1) * 5;
cloud->points[z*a*a + y*a + x].z = log(z + 1) * 5;
cloud->points[z*a*a + y*a + x].r = 0;
cloud->points[z*a*a + y*a + x].g = 255;
cloud->points[z*a*a + y*a + x].b = 0;
}
}
}
srand((int)time(0));
int pp = rand() % num;
pcl::KdTreeFLANN<Point6> kdtree;
kdtree.setInputCloud(cloud);
vector<int> pointIdxRadiusSearch;
vector<float> pointRadiusSquaredDistance;
float radius = 4;
Point6 temp = cloud->points[pp];
float distance;
float delta = 0.5;
int count = 0;
do {
cloud->points[pp] = temp;
cout << "Neighbors within radius search at (" << temp.x << " " << temp.y << " " << temp.z << ") with radius=" << radius << endl;
float sum_x = 0, sum_y = 0, sum_z = 0;
if (kdtree.radiusSearch(temp, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
{
for (size_t i = 0;