目录
- 1. Canny 边缘检测理论
- 1.1、高斯滤波
- 1.2、Sobel算子计算梯度和方向
- 1.3、非极大值抑制(定位准确的边缘同时可缩小边缘线宽)
- 1.4、双阈值检测
- 2. OpenCV 之 Canny 边缘检测
边缘检测一般是识别目标图像中亮度变化明显的像素点. 因为显著变化的像素点通常反映了图像变化比较重要的地方.
1. Canny 边缘检测理论
Canny 是一种常用的边缘检测算法. 其是在 1986 年 John F.Canny 提出的.
Canny 是一种 multi-stage 算法,分别如下:
具体流程:
- 高斯滤波:平滑图像,消除噪声
- 梯度和方向计算:利用Sobel算子计算每个像素点的梯度和方向
- 非极大值抑制:消除边缘检测带来的杂散相应
- 双阈值:检测真正和潜在的边缘
- 抑制弱边缘:通过抑制弱边缘来完成边缘检测
1.1、高斯滤波
高斯滤波最重要的还是卷积核核,通常使用高斯平滑滤波器卷积降噪,这里以size=3的高斯内核为例:这里做了归一化处理(元素和为 1)
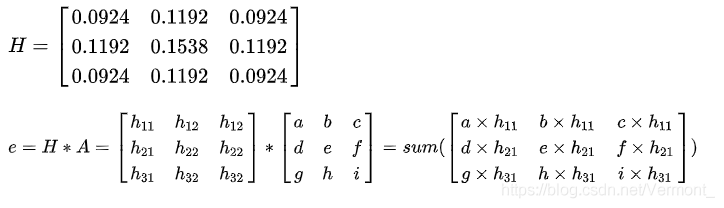
高斯去噪其实就是一个低通滤波器,滤除高频噪声。
1.2、Sobel算子计算梯度和方向
计算方法:
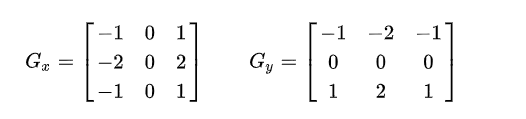
这里  是指水平方向的掩码模板,
是指水平方向的掩码模板, 是指垂直方向的掩码模板。根据上面的模板可以计算出图像梯度幅值和方向。
是指垂直方向的掩码模板。根据上面的模板可以计算出图像梯度幅值和方向。

1.3、非极大值抑制(定位准确的边缘同时可缩小边缘线宽)
非极大值抑制是进行边缘检测的重要步骤,通俗的来说,就是获取局部的最大值,将非极大值所对应的灰度值设置为背景像素点。像素邻近区域满足梯度值的局部最优值判断为该像素的边缘,对非极大值相关信息进行抑制。利用这个准则可以剔除大部分的非边缘点。
简单的说呢?就是保留梯度大的像素点点,对于那些在边缘旁边的杂散点,梯度相对较小,利用非极大值抑制就可以很好的去除杂散点。
1.4、双阈值检测
这里的双阈值并不是说介于阈值之间的像素保留,外面的的去除。这里的阈值检测有所不同。

分析:
- 梯度大于maxVal的像素点保留,视为边缘
- 梯度小于minVal的像素点弃用,不视为边缘
- 梯度介于两者之间的,分情况判断:
- 四周有包含大于maxVal的像素点,视为边缘
- 四周没有大于maxVal的像素点,不视为边缘
根据上面的分析,我们可以得出来:A, D点位边界; B, C点不是边界。
注意:
具体这两个值怎么设置,我们就要分析两个值变化对图像的影响。
- maxVal: 带来最明显的差异,增大maxVal无疑会导致原来的边界点可能会直接消失。但这种消失时是成片消失。
- minVal: 增大minVal,会导致有些待定像素点被弃用,也就是靠近边界像素点的介于双阈值之间的被弃用。导致的现象就是边界出现破损,这种非成片消失。只是边界信息不完整。
下面以 video = cv2.Canny(img, 80, 250) 为例:分别增大minVal和maxVal。
增大minVal: (边界出现缺损)

增大maxVal: (边界出现成片消失,边界信息完整)

总结:
在实际应用中,观察梯度图像,如果边界信息缺损,那么适当的减小minVal;如果有不想要的区域出现,那么适当的增加MaxVal。
2. OpenCV 之 Canny 边缘检测
OpenCV 提供了 cv2.canny() 函数.
edge = cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]])
- 参数 Image - 输入图片,必须为单通道的灰度图
- 参数 threshold1 和 threshold2 - 分别对应于阈值 minVal 和 maxVal
- 参数 apertureSize - 用于计算图片提取的 Sobel kernel 尺寸. 默认为 3.
- 参数 L2gradient - 指定计算梯度的等式. 当参数为 True 时,采用 1.2 中的梯度计算公式,其精度更高;否则采用的梯度计算公式为:
 . 该参数默认为 False.
. 该参数默认为 False.
具体代码:
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('test.jpg', 0)
edges = cv2.Canny(img, 100, 200)
plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(edges,cmap = 'gray')
plt.title('Edge Image'), plt.xticks([]), plt.yticks([])
plt.show()

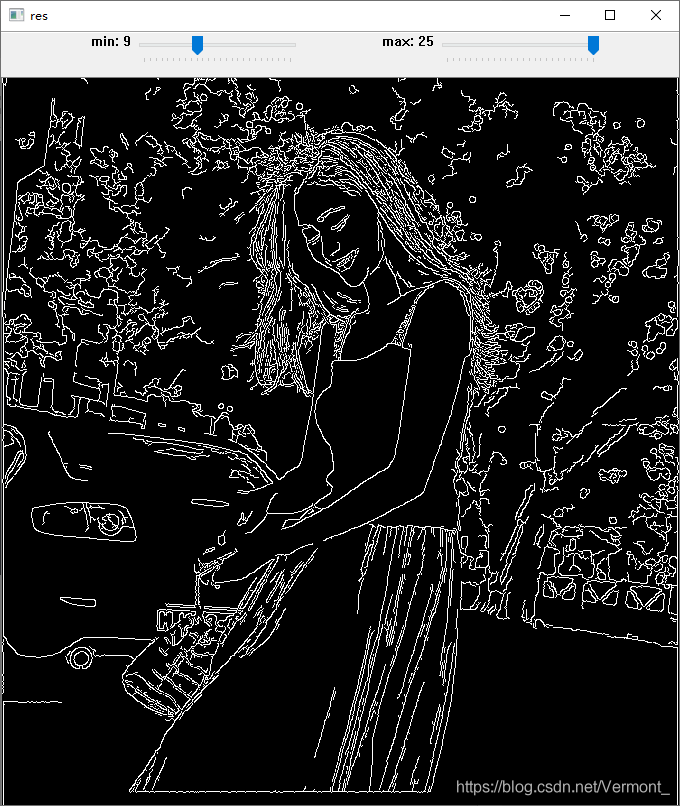
带 minVal 和 maxVal 滑动条的使用:
import numpy as np
import cv2
def nothing(x):
pass
img=cv2.imread('test.jpg',0)
cv2.namedWindow('res')
cv2.createTrackbar('min','res',0,25,nothing)
cv2.createTrackbar('max','res',0,25,nothing)
while(1):
if cv2.waitKey(1) & 0xFF == 27:
break
maxVal=cv2.getTrackbarPos('max','res')
minVal=cv2.getTrackbarPos('min','res')
canny=cv2.Canny(img,10*minVal,10*maxVal)
cv2.imshow('res',canny)
cv2.destroyAllWindows()
到此这篇关于OpenCV中Canny边缘检测的实现的文章就介绍到这了,更多相关OpenCV Canny边缘检测内容请搜索站长博客以前的文章或继续浏览下面的相关文章希望大家以后多多支持站长博客!
jsjbwy