�ع�Games101 chapter 1 - 6
ǰ��
����ֻд�ع˺����¼�����ʶ��֪ʶ
�ӳ���������
����MVP����֮��ģ�Ϳռ���ij������꣬ת�����˲ü��ռ��µ����꣬��ʱ��Ϊ�ü��ռ�ķ�Χ��x��[-W/2��W/2]��y��[-H/2��H/2]�����Ծ������������任�����г���pz�����ӳ���
һ��
\[-1��2��\frac{\left( \frac{p_x}{p_z}��near \right)}{w}��1
\\
-1��2��\frac{\left( \frac{p_y}{p_z}��near \right)}{h}��1
\]
����
\[\left[ \begin{matrix}
x& y& z& w\\
\end{matrix} \right] \left[ \begin{matrix}
1& 0& 0& 0\\
0& 1& 0& 0\\
0& 0& 1& 0\\
\varDelta x& \varDelta y& \varDelta z& 1\\
\end{matrix} \right] =\left[ \begin{matrix}
x+\varDelta x*w& y+\varDelta y*w& z+\varDelta z*w& w\\
\end{matrix} \right]
\]
ֻ�е�W=1�������ά����ת���ǵȼ۵ģ����ܱ�֤λ�Ƶ�������ȷ�ģ�W=0ʱ����û��λ��
ֻ�е�W=1ʱ����ά�����ת������ά����������ǵȼ۵�
����ϵ�任�;����Ƶ�
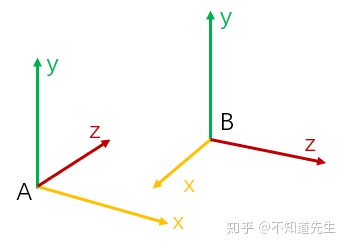
����ϵ�任���ⲻֱ�ۣ�������101������ʦ��˵����������ϵ��ת��ͨ��������е����Ա任����A����ϵ�µĵ�P�����Ͼ���ó�B����ϵ�µĵ�P'���������������ı任������ͶӰ�任������ͶӰ�任�ȣ���εó��任����M��ͨ������任����������˵����
��֪����ϵA������ϵB
\[����ϵB��x��y��z��������ϵA�¿ɱ�ʾΪ��u_{\mathrm{x}}��u_{\mathrm{y}}��v_{\mathrm{z}}��0��
\]
\[\left( \mathrm{v}_{\mathrm{x}},\mathrm{v}_{\mathrm{y}},\mathrm{v}_{\mathrm{z}},0 \right) \text{��}\left( \mathrm{w}_{\mathrm{x}},\mathrm{w}_{\mathrm{y}},\mathrm{w}_{\mathrm{z}},0 \right) \text{������ϵB��ԭ��������ϵA�±�ʾΪ��Q}_{\mathrm{x}},\mathrm{Q}_{\mathrm{y}},\mathrm{Q}_{\mathrm{z}},1\text{��}
\]
������ϵB��һ��P������ϵB�任������ϵA�ı任����Ϊ����ע��˴��������ǽ�Դ����ϵA�任��Ŀ������ϵB�£�
\[\mathrm{M}=\left[ \begin{matrix}
u_{\mathrm{x}}& u_{\mathrm{y}}& u_{\mathrm{z}}& 0\\
v_{\mathrm{x}}& v_{\mathrm{y}}& v_{\mathrm{z}}& 0\\
w_{\mathrm{x}}& w_{\mathrm{y}}& w_{\mathrm{z}}& 0\\
Q_{\mathrm{x}}& Q_{\mathrm{y}}& Q_{\mathrm{z}}& 1\\
\end{matrix} \right]
\]
��֮ǰ��˵���任�����е�p�ڿռ��еľ���λ��û�з����ı䣬ֻ�Dzο�����ϵ�����˸ı䣬��B����ϵ�䵽A����ϵ�������ţ���ת��ƽ�Ʊ任ֻ����ͬһ����ϵ�²������壩
����任�ǻ��ڻ�������Ľ��
- ����任֮��ͬһ������ϵ����������Ϊ����ϵ���䣬���λ�øı�
- ����任֮�ڲ�ͬ����ϵ����������Ϊ��ľ���λ�ò��䣬����ϵ�ı�
\[\left[ \begin{array}{c}
x^{'}\\
y^{'}\\
\end{array} \right] =B\left[ \begin{array}{c}
x\\
y\\
\end{array} \right] \Rightarrow \left[ \begin{array}{c}
x\\
y\\
\end{array} \right] =B^{-1}\left[ \begin{array}{c}
x^{'}\\
y^{'}\\
\end{array} \right] \text{��}B=\left[ \begin{matrix}
\overrightarrow{b_1}& \overrightarrow{b_2}\\
\end{matrix} \right] \text{����}\overrightarrow{b_1}\text{��}\overrightarrow{b_2}\text{������ϵ}B\text{�Ļ�����}
\]
���У�����B�ĸ����������ֱ��ӦB����ϵ�ĸ�����������\(
\left[ \begin{array}{c}
x\\
y\\
\end{array} \right]
\)������\(
\overrightarrow{OP}
\)����˵��P��B����ϵ�ı�ʾ��\(
\left[ \begin{array}{c}
x^{'}\\
y^{'}\\
\end{array} \right]
\)��������\(
\overrightarrow{OP}
\)���ߵ�P��A����ϵ�еı�ʾ
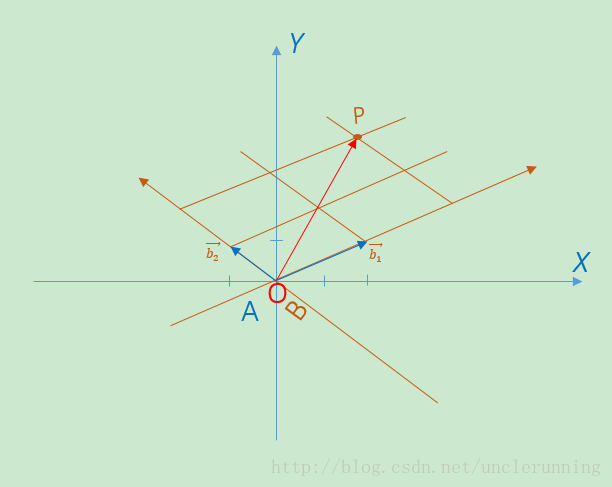
��ͼ�е���������\(
\overrightarrow{b_1}
\)��\(
\overrightarrow{b_2}
\)Ϊ��ȷ��һ������ϵB����Ȼ��B����ϵ��\(
\overrightarrow{b_{1B}}=\left[ \begin{array}{c}
1\\
0\\
\end{array} \right]
\)��\(
\overrightarrow{b_{2B}}=\left[ \begin{array}{c}
0\\
1\\
\end{array} \right]
\)������������\(
\overrightarrow{b_1}
\)��\(
\overrightarrow{b_2}
\)��λ��A����ϵ�У��õ�\(
\overrightarrow{b_{1A}}=\left[ \begin{array}{c}
2\\
1\\
\end{array} \right]
\)��\(
\overrightarrow{b_{2A}}=\left[ \begin{array}{c}
-1\\
1\\
\end{array} \right]
\)
\(
\because \overrightarrow{OP}=2\overrightarrow{b_1}+2\overrightarrow{b_2}
\)
\(
\therefore \overrightarrow{OP}\)��B����ϵ�еı�ʾΪ\(
\left[ \begin{array}{c}
2\\
2\\
\end{array} \right]
\)�����ڣ���\(
\overrightarrow{OP}
\)��A����ϵ����
\(
\overrightarrow{OP}=2\overrightarrow{b_1}+2\overrightarrow{b_2}=2\overrightarrow{b_{1A}}+2\overrightarrow{b_{2A}}=\left[ \begin{matrix}
\overrightarrow{b_{1A}}& \overrightarrow{b_{2A}}\\
\end{matrix} \right] \left[ \begin{array}{c}
2\\
2\\
\end{array} \right] =\left[ \begin{array}{c}
2\\
4\\
\end{array} \right]
\\
\)
���ڣ������B=\(
\left[ \begin{matrix}
\overrightarrow{b_{1A}}& \overrightarrow{b_{2A}}\\
\end{matrix} \right]
\)��P������B����ϵ��ʾ������һ��\((x,y)\)��
����\(
\overrightarrow{OP}
\)��A����ϵ�еı�ʾ\(
\left[ \begin{array}{c}
^{x^{'}}\\
y^{'}\\
\end{array} \right] =B\left[ \begin{array}{c}
x\\
y\\
\end{array} \right]
\)����Ȼ��B�ǿ���ģ����Ǿ�����֮ǰ�Ľ���
��ô��������ӵ��У���������Ҫ֪��ij����ת������ϵ���������ʱ��ͨ��������Ҳ���Լ���ӡ������B����ϵ���е�\(Q(3,4)\)����\(\overrightarrow{OQ}=(3,4)\)�����ݸղŵ����ӿ��Կ�����ת����A����ϵ�µĵ�
\[\overrightarrow{OQ}=2\overrightarrow{b_1}+2\overrightarrow{b_2}=2\overrightarrow{b_{1A}}+2\overrightarrow{b_{2A}}=\left[ \begin{matrix}
\overrightarrow{b_{1A}}& \overrightarrow{b_{2A}}\\
\end{matrix} \right] \left[ \begin{array}{c}
3\\
4\\
\end{array} \right] =\left[ \begin{matrix}
2& -1\\
1& 1\\
\end{matrix} \right] \left[ \begin{array}{c}
5\\
4\\
\end{array} \right] =\left[ \begin{array}{c}
6\\
9\\
\end{array} \right]
\]
��ת����A����ϵ�µĵ�\(Q^{'}\)������Ϊ\(Q^{'}(6,9)\)
��Ȼ����������ǻ��ڶ�ά�ģ����ǣ����ۿ�����չ������ά��
�������ۣ�
��B����ϵ�Ļ�������λ��A����ϵ��Ȼ��λ֮��Ļ�������Ϊ����B�����������þ���B��B����ϵ�еĵ�P��������о���任�����õ���P��A����ϵ�е����ꡣ������̣����Ǵ�����ϵB������ϵA��һ���ݹ���
View/Camera Transformation
�Ƚ�����Ƶ�ԭ�㣬Ȼ����зֱ�������������ת���þ����ʾ����\(M_{view}=R_{view}T_{view}\)
\[T_{view}=\left[ \begin{matrix}
1& 0& 0& -x_e\\
0& 1& 0& -y_e\\
0& 0& 1& -z_e\\
0& 0& 0& 1\\
\end{matrix} \right]
\]
- \(Rotate\,\,g\,\,to\,\,-Z, t\,\,to\,\,Y, \left( g��t \right) \,\,To\,\,X\)
g��������ķ���lookAt����t��������ϵķ���Up����Ҳ���������-Z���Y�ᣬ�����������������һ��������
\[R_{view}^{-1}=\left[ \begin{matrix}
x_{\widehat{g}��\widehat{t}}& x_t& x_{-g}& 0\\
y_{\widehat{g}��\widehat{t}}& y_t& y_{-g}& 0\\
z_{\widehat{g}��\widehat{t}}& z_t& z_{-g}& 0\\
0& 0& 0& 1\\
\end{matrix} \right]
\]
��ת��������������������ת������������ת�����ת��
\[R_{view}^{}=\left[ \begin{matrix}
x_{\widehat{g}��\widehat{t}}& y_{\widehat{g}��\widehat{t}}& z_{\widehat{g}��\widehat{t}}& 0\\
x_t& y_t& y_t& 0\\
x_{-g}& y_{-g}& z_{-g}& 0\\
0& 0& 0& 1\\
\end{matrix} \right]
\]
����ͶӰ����
����������ͶӰ������ͶӰ������Ҫ��x��y��z�Ƶ�-1��1�ķ�Χ�����Ƚ����ĵ��Ƶ�ԭ�㣬Ȼ������
\[M_{ortho}=\left( \begin{matrix}
\frac{2}{r-l}& 0& 0& 0\\
0& \frac{2}{t-b}& 0& 0\\
0& 0& \frac{2}{n-f}& 0\\
0& 0& 0& 1\\
\end{matrix} \right) \left( \begin{matrix}
1& 0& 0& -\frac{r+l}{2}\\
0& 1& 0& -\frac{t+b}{2}\\
0& 0& 1& -\frac{n+f}{2}\\
0& 0& 0& 1\\
\end{matrix} \right)
\]
��ͶӰ�����Ƶ�
�����Ƚ�frustum ת��Ϊcuboid��n -> n,f -> f��(\(
M_{persp->ortho}
\)
)
Ȼ����������ͶӰ
����ͶӰ�任����������
- v = P������*p
- \(v=\frac{v}{v_w}=\frac{v}{pz}\)�ӳ���


���ϴ���Ƴ���ʽ��һ�����������ù�ʽչʾ��Ϊֱ��
\[\left( \begin{matrix}
m00& m01& m02& m03\\
m10& m11& m12& m13\\
m20& m21& m22& m23\\
m30& m31& m32& m33\\
\end{matrix} \right) \left( \begin{array}{c}
x\\
y\\
z\\
1\\
\end{array} \right) =\left( \begin{array}{c}
\frac{x}{z*aspect*\tan \left( \frac{fov}{2} \right)}\\
\frac{y}{z*tan\left( \frac{fov}{2} \right)}\\
z^{����}\\
1\\
\end{array} \right)
\]
\[m00*x+m01*y+m02*z+m03=\frac{x}{z*aspect*\tan \left( \frac{fov}{2} \right)}
\]
���ұߵ���ά��������ʾ������ÿһ�����z��������
\[\left( \begin{matrix}
m00& m01& m02& m03\\
m10& m11& m12& m13\\
m20& m21& m22& m23\\
m30& m31& m32& m33\\
\end{matrix} \right) *\left( \begin{array}{c}
x\\
y\\
z\\
1\\
\end{array} \right) =\left( \begin{array}{c}
\frac{x}{aspect*\tan \left( \frac{fov}{2} \right)}\\
\frac{y}{\tan \left( \frac{fov}{2} \right)}\\
z*z^{{'}{'}}\\
z\\
\end{array} \right)
\]
������þ���Ϊ
\[\left( \begin{matrix}
\frac{1}{aspect*\tan \left( \frac{fov}{2} \right)}& 0& 0& 0\\
0& \frac{1}{\tan \left( \frac{fov}{2} \right)}& 0& 0\\
0& 0& m22& m23\\
0& 0& 1& 0\\
\end{matrix} \right)
\]
\[m22*z+m23 =\,\,z*z^{{'}{'}}
\\
\Rightarrow m22+\frac{m23}{z}=z^{{'}{'}}
\]
��Ϊz=zNearʱ��z''=-1��z=zFarʱ��z''=1���������µ�ʽ
\[m22+\frac{m23}{zNear}=-1
\\
m22+\frac{m23}{zFar}=1
\]
������ã�
\[m22=\frac{-zFar-zNear}{zNear-zFar}
\\
m23=\frac{2*zFar*zNear}{zNear-zFar}
\]
������ͶӰ����Ϊ
\[\left( \begin{matrix}
\frac{1}{aspect*\tan \left( \frac{fov}{2} \right)}& 0& 0& 0\\
0& \frac{1}{\tan \left( \frac{fov}{2} \right)}& 0& 0\\
0& 0& \frac{-zFar-zNear}{zNear-zFar}& \frac{2*zNear*zFar}{zNear-zFar}\\
0& 0& 1& 0\\
\end{matrix} \right)
\]
�������þ�����������ڵ�һ���������꣬�õ�һ���µ��������ٽ����������ÿ���������Ե��ĸ��������˲���Ҳ����Ϊ�ӳ�������w���������Ϳ��Եõ�����ӳ�䵽���������۲������µ�����
ע�⣺z�����ӳ�䷽ʽ�Ļ�ã����������Ϊ�˷������˷��IJ������������z������cvv�е�z�����ӳ�䷽ʽ��
\[m22+\frac{m23}{z}=z^{{'}{'}}
\]
��ʱ��ӳ�䲢�������Եģ���zԽ��ʱ��z�ı仯��z''���Ŷ�ԽС
Canonical Cube to Screen
- Irrelevant to z
- Transform in xy plane : [-1, 1] to [0, width] �� [0, height]
- Viewport transform matrix:
�ӿھ���
\[M_{viewport}=\left[ \begin{matrix}
\frac{width}{2}& 0& 0& \frac{width}{2}\\
0& \frac{height}{2}& 0& \frac{height}{2}\\
0& 0& 1& 0\\
0& 0& 0& 1\\
\end{matrix} \right]
\]
���z�ļ���
ǰ��
3D��դ��������ͼԪ���任��Screen space֮����Ϊ�����Screen space��2D��Screen Space��ȫһ�£�����2D�Ĺ�դ���㷨��������Ȼ���á�
Ȼ������ͼԪ������ͶӰ�任����ͶӰ�任Ϊ�����Ա任�����Բ����ü����Բ�ֵ��ȡfragment������

ͶӰ�任���ᱣ����Ծ��벻����
����ͼ��ʾ��view space�е��߶�v0v1������$
p0\left( p0_x,p0_y,p0_z,1 \right)
$��$
p1\left( p1_x,p1_y,p1_z,1 \right)
$��near plane�ϵ�ͶӰΪ��$
s0\left( s0_x,s0_y \right)
$��$
s1\left( s1_x,s1_y \right)
$��$
p0
$��$p1$�м�һ��$v(v_x,v_y,v_z,1)$��near plane�ϵ�ͶӰΪ��$q(q_x,q_y)$����ͼ�п��Կ�����v��p0��p1�ľ����ֵ���q��s0��s1�ľ����ֵ��ȫ��ͬ��ͶӰ�任�����־��벻�䡣
Ϊ��ִ��z-buffer�㷨����Ҫͨ����q��ȡ��v�����ֵ(z)
��\(v\)�����ֵ����ͨ�����·�����ֵ�õ���
\[v_z=\frac{1}{\frac{c}{p1_z}+\frac{\left( 1-c \right)}{p0_z}}
\]
�������Ƶ��Ĺ��̣�
��д�棺

���ְ棺
���ڵ�\(q\)Ϊ��\(v\)��near plane�ϵ�ͶӰ����˵�\(q\)���\(v\)�Ĺ�ϵΪ��
- \(q_x=\frac{v_x��near}{v_z}\)
��\(v\)λ��\(p0p1\)֮�䣬��
- \(v_z=p0_{z}+t��(p1_z-p0_z)=\frac{v_x��near}{q_x}\)
�ɵ�\(v\)��\(p0\)��\(p1\)֮�䣬��\(q\)��\(s0\)��\(s1\)֮������
- \(v_x=p0_{x}��(1-t)+p1_{x}��t=p0_{x}+t��(p1_{x}-p0_{x})\)
- \(q_x=s0_{x}��(1-c)+s1_{x}��c=s0_{x}+c��(s1_{x}-s0_{x})\)
����ʽ(1)�ɵ�
\(v_z=\frac{v_x��near}{q_x}=\frac{(p0_x+t��(p1_x-p0_x))��near}{s0_x+c��(s1_x-s0_x)}\)ʽ(2)
��s0��s1�ֱ�Ϊp0��p1��near plane�ϵ�ͶӰ����
- \(s0_x=\frac{p0_x��near}{p1_z}\)
- \(s1_x=\frac{p1_x��near}{p1_z}\)
����ʽ(2)�ɵã�
\[v_z=\frac{\left( \frac{p0_x��s0_x}{near}+t��\left( \frac{p1_x��s1_x}{near}-\frac{p0_x��s0_x}{near} \right) \right) ��near}{s0_x+c��\left( s1_x-s0_x \right)}
\]
\[v_z=\frac{\left( \frac{p0_x��s0_x}{near}+t��\left( \frac{p1_x��s1_x}{near}-\frac{p0_x��s0_x}{near} \right) \right) ��near}{s0_x+c��\left( s1_x-s0_x \right)}
\\
v_z=\frac{\left( p0_x��s0_x+t��\left( p1_x��s1_x-p0_x��s0_x \right) \right)}{s0_x+c��\left( s1_x-s0_x \right)}
\\
p0_z+t��\left( p1_z-p0_z \right) =\frac{\left( p0_x��s0_x+t��\left( p1_x��s1_x-p0_x��s0_x \right) \right)}{s0_x+c��\left( s1_x-s0_x \right)}
\\
\left( p0_z+t��\left( p1_z-p0_z \right) \right) ��\left( s0_x+c��\left( s1_x-s0_x \right) \right) =p0_x��s0_x+t��\left( p1_x��s1_x-p0_x��s0_x \right)
\\
p0_z��s0_x+p0_z��c��\left( s1_x-s0_x \right) +t��\left( p1_z-p0_z \right) ��s0_x+t��c��\left( p1_z-p0_z \right) ��\left( s1_x-s0_x \right) =p0_x��s0_x+t��\left( p1_x��s1_x-p0_x��s0_x \right)
\]
����ã�
\[t��\left( p1_z-c��\left( p1_z-p0_z \right) \right) =c��p0_z
\]
��
\[t=\frac{c��p0_z}{c��p0_z+(1-c)��p1_z}
\]
����ʽ(1)�ɵ�
\[v_z=p0_z+t��(p1_z-p0_z)
\]
\[v_z=p0_z+\frac{c��p0_z}{c��p0_z+(1-c)��p1_z}��(p1_z-p0_z)
\]
\[v_z=\frac{1}{\frac{c}{p1_z}+\frac{(1-c)}{p0_z}}
\]
��View Space��������\(v0v1v2\)���任��Screen Space��Ϊ������\(s0s1s2\)��\(v0v1v2\)��һ��v��Screen Space��ͶӰ��\(s0s1s2\)�ڵĵ�\(q\)����������\(s0s1s2\)�ڵĵ㣨fragment��\(q\)������ͨ�����·���ȡ��fragment\(q\)��View Space�ж�Ӧ�����ֵ��
\[q.z=v.z=\frac{1}{\frac{\lambda0}{v0.z}+\frac{\lambda1}{v1.z}+\frac{\lambda2}{v2.z}}
\]
\(\lambda0,\lambda1,\lambda2\)Ϊ��p��������\(s0s1s2\)�ڵ���������
������ۣ�
��Screen Space������\(s0,s1,s2\)��һ��\(p\)���������Բ�ֵ�Ĺ�ʽΪ:
\[Atribute\left( p \right) =z��\left( \frac{\lambda 0��Atribute\left( v0 \right)}{z0}+\frac{\lambda 1��Atribute\left( v1 \right)}{z1}+\frac{\lambda 2��Atribute\left( v2 \right)}{z2} \right)
\]
\(\lambda0,\lambda1,\lambda2\)Ϊ��\(p\)���������꣬\(z0,z1,z2,z\)�ֱ�Ϊ\(s0,s1,s2,p\)��view space�ж�Ӧ������ֵ�����������������ֵ�õ�\(p\)��NDC Space�ڶ�Ӧ������ֵ
�˴���һ��Games101��ҵ����й�����ȵļ��㣬��������ʽ��Ӧ\(z = z_interpolated*w_reciprocal\)
auto[alpha, beta, gamma] = computeBarycentric2D(x, y, t.v);
float w_reciprocal = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float z_interpolated =
alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
if (depth_buf[get_index(x, y)] > z_interpolated) {
depth_buf[get_index(x, y)] = z_interpolated;
Eigen::Vector3f point;
point << static_cast<float>(x), static_cast<float>(y), z_interpolated;
set_pixel(point, t.getColor());
}
�����˹��ת��ʽ
ָ��������k��ת\(
\alpha
\)�ǵó���ת����
��д�ò��ã�������...
��д�棺

���ְ棺
�����Ƚ�\(\overrightarrow{k}\)�����ɵ�λ������������Ҫ���غ�����һ����ʽ�Ƿ��������Щ����д���ﲻ��Ҫ������λ���������Ǵ���
\[\overrightarrow{v}��\overrightarrow{k}=|\overrightarrow{v}|��|\overrightarrow{k}|��\cos <\overrightarrow{v}\text{,}\overrightarrow{k}>=|\overrightarrow{v}|��\cos <\overrightarrow{v}\text{,}\overrightarrow{k}>
\]
�ɵ�
\[\overrightarrow{v_{||}}=|\overrightarrow{v}|��\cos <\overrightarrow{v},\overrightarrow{k}>��\overrightarrow{k}
\\
\overrightarrow{v}=\overrightarrow{v_{\bot}}+\overrightarrow{v_{||}}
\\
\overrightarrow{v_{\bot}}=\overrightarrow{v}-\overrightarrow{v_{||}}=\overrightarrow{v}-\left( \overrightarrow{v}��\overrightarrow{k} \right) \overrightarrow{k}
\]
��\(\overrightarrow{k}\)����תʱ�����������ߣ��ɿ����ײ����������ư�Բ����ת
Ҫ���\(\overrightarrow{v_{rot}}=\overrightarrow{v_{||}}+\overrightarrow{v_{rot\bot}}\)����\(\overrightarrow{v_{rot\bot}}\)�������ֽ���\(
\overrightarrow{v_{rot\bot}}=\overrightarrow{a}+\overrightarrow{b}
\)����\(
|\overrightarrow{w}|=|\overrightarrow{v_{\bot}}|
\)������\(
\overrightarrow{w}=\overrightarrow{k}��\overrightarrow{v_{\bot}}=\overrightarrow{k}��\left[ \overrightarrow{v}-\overrightarrow{v_{||}} \right] =\overrightarrow{k}��\overrightarrow{v}-\overrightarrow{k}��\overrightarrow{v_{||}}=\overrightarrow{k}��\overrightarrow{v}-0=\overrightarrow{k}��\overrightarrow{v}
\)
��������\(
\overrightarrow{a}
\)��\(
\overrightarrow{b}
\)
\[|\overrightarrow{a}|=|\overrightarrow{v_{rot\bot}}|��\cos \left( \theta -90 \right) =|\overrightarrow{v_{rot\bot}}|��\sin \left( \theta \right)
\\
\overrightarrow{a}=\frac{\overrightarrow{w}}{|\overrightarrow{w}|}��|\overrightarrow{a}|=\frac{\overrightarrow{w}}{|\overrightarrow{v_{rot\bot}}|}��|\overrightarrow{v_{rot\bot}}|��\sin \left( \theta \right) =\overrightarrow{w}��\sin \left( \theta \right)
\]
\[|\overrightarrow{b}|=|\overrightarrow{v_{rot\bot}}|��\cos \left( 180-\theta \right) =|\overrightarrow{v_{rot\bot}}|��\cos \left( \theta \right)
\\
\overrightarrow{b}=\frac{\overrightarrow{v_{\bot}}}{|\overrightarrow{v_{\bot}}|}��|\overrightarrow{b}|=\frac{\overrightarrow{v_{\bot}}}{|\overrightarrow{v_{\bot}}|}��|\overrightarrow{v_{rot\bot}}|��\cos \left( \theta \right) =\overrightarrow{v_{\bot}}��\cos \left( \theta \right) \,\, \text{ע��}|\overrightarrow{v_{\bot}}|=|\overrightarrow{v_{rot\bot}}|
\]
\[\overrightarrow{v_{rot\bot}}=\overrightarrow{a}+\overrightarrow{b}=\overrightarrow{w}��\sin \left( \theta \right) +\overrightarrow{v_{\bot}}��\cos \left( \theta \right) =\sin \left( \theta \right) ��\left( \overrightarrow{k}��\overrightarrow{v} \right) +\cos \left( \theta \right) \left( \overrightarrow{v}-\left( \overrightarrow{v}��\overrightarrow{k} \right) \overrightarrow{k} \right)
\\
\overrightarrow{v_{rot}}=\overrightarrow{v_{||}}+\overrightarrow{v_{rot\bot}}=\left( \overrightarrow{v}��\overrightarrow{k} \right) \overrightarrow{k}+\sin \left( \theta \right) ��\left( \overrightarrow{k}��\overrightarrow{v} \right) +\cos \left( \theta \right) \left( \overrightarrow{v}-\left( \overrightarrow{v}��\overrightarrow{k} \right) \overrightarrow{k} \right)
\\
=\cos \left( \theta \right) \overrightarrow{v}+\left( 1-\cos \left( \theta \right) \left( \overrightarrow{v}��\overrightarrow{k} \right) \overrightarrow{k} \right) +\sin \left( \theta \right) ��\left( \overrightarrow{k}��\overrightarrow{v} \right)
\]
��\(
\overrightarrow{k}
\)��\(
\overrightarrow{v}
\)�ֱ�дΪ������
\[\overrightarrow{k}=\left( \begin{array}{c}
k_x\\
k_y\\
k_z\\
\end{array} \right)
\]
\[\overrightarrow{v}=\left( \begin{array}{c}
v_x\\
v_y\\
v_z\\
\end{array} \right)
\]
��\(
\overrightarrow{v_{rot}}=R��\overrightarrow{v}
\)
����ʽ��
\[\left( \overrightarrow{v}��\overrightarrow{k} \right) \overrightarrow{k}=\overrightarrow{k}\left( \overrightarrow{v}��\overrightarrow{k} \right) =\overrightarrow{k}\left( \overrightarrow{k^T}��\overrightarrow{v} \right)
\]
\[\overrightarrow{k}��\overrightarrow{v}=\left[ \begin{array}{c}
k_yv_z-k_zv_y\\
k_zv_x-k_xv_z\\
k_xv_y-k_yv_x\\
\end{array} \right] =\left[ \begin{matrix}
0& -k_z& k_y\\
k_z& 0& -k_x\\
-k_y& k_x& 0\\
\end{matrix} \right] \left[ \begin{array}{c}
v_x\\
v_y\\
v_z\\
\end{array} \right]
\]
�����������ʽ�ӿɵ�,����\(I\)Ϊ3��3�ĵ�λ����
\[R=I\cos \left( \theta \right) +\left( 1-\cos \left( \theta \right) \right) \left( \begin{array}{c}
k_x\\
k_y\\
k_z\\
\end{array} \right) \left( \begin{matrix}
k_x& k_y& k_z\\
\end{matrix} \right) +\sin \left( \theta \right) \left( \begin{matrix}
0& -k_z& k_y\\
k_z& 0& -k_x\\
-k_y& k_x& 0\\
\end{matrix} \right) \,\,
\]
�����DZȽ�ͨ�õı�ʾ��ʽ
\[R\left( n,\alpha \right) =\cos \left( \alpha \right) I+\left( 1-\cos \left( \alpha \right) \right) nn^T+\sin \left( \alpha \right) \left( \begin{matrix}
0& -n_z& n_y\\
n_z& 0& -n_x\\
-n_y& n_x& 0\\
\end{matrix} \right)
\]
�������õIJ���
https://blog.csdn.net/unclerunning/article/details/70948696#�������ϵ��ƽ��
https://zhuanlan.zhihu.com/p/45757899
bk