注:
一元语法模型:
我考上大学只与考试当天的我有关,与前一天模拟考的我没有半毛钱关系
二元语法模型:
我考上大学与我前一天模拟考的我有关
书接上回
我们先做一些约定:
Qhidden为所有隐藏状态种类的合集,有N种

例如我们之前定义了七个标签(https://www.cnblogs.com/DAYceng/p/14923065.html),那么N = 7
Vobs表示可观测的序列的合集(这里由汉字组成)
其中,V为单个的字,M为已知字的个数

有一串自然语言文本O,共T个字,则观测合集可表示为

而观测到的实体对应的实体标记就是隐状态合集I

I与O一一对应并且长度一致
注:常称T为时刻,如上式中共有T个时刻(T个字)
HMM的假设
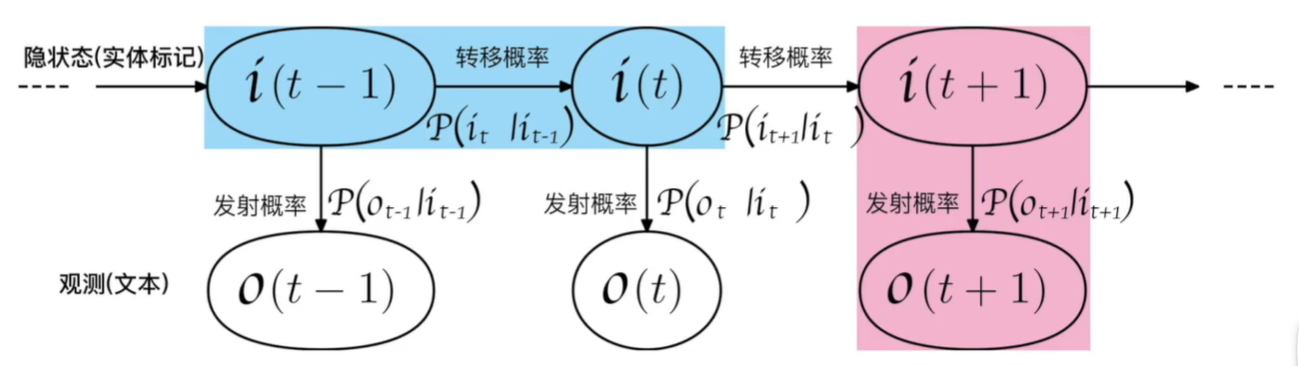
图片出处:https://github.com/aespresso/a_journey_into_math_of_ml
假设一:
当前第 个隐状态(实体标签)只跟前一时刻的
个隐状态(实体标签)只跟前一时刻的 隐状态(实体标签)有关,连续多个状态构成隐马尔可夫链I(隐状态合集),与除此之外的其他隐状态无关。
隐状态(实体标签)有关,连续多个状态构成隐马尔可夫链I(隐状态合集),与除此之外的其他隐状态无关。
例如,上图中:蓝色的部分指的是 只与
只与 有关,而与蓝色区域之外的所有内容都无关,而
有关,而与蓝色区域之外的所有内容都无关,而 指的是隐状态
指的是隐状态 从时刻转向t时刻的概率。
从时刻转向t时刻的概率。
假设二:
观测独立的假设,我们上面说过,HMM模型中是由隐状态序列(实体标记)生成可观测状态(可读文本)的过程,观测独立假设是指在任意时刻观测 只依赖于当前时刻的隐状态i,与其他时刻的隐状态无关。
只依赖于当前时刻的隐状态i,与其他时刻的隐状态无关。
例如上图中:粉红色的部分指的是 只与
只与 有关,跟粉红色区域之外的所有内容都无关。
有关,跟粉红色区域之外的所有内容都无关。
至此,我们确定了状态与观测之间的关系。
接下来将介绍HMM用于模拟时序序列生成过程的三个要素(即HMM模型的三个参数):
初始状态概率向量
初始隐状态概率通常用π表示(不是圆周率!!)

该表达式的含义:
自然语言序列的第一个字 的实体标签是
的实体标签是 的概率,即初始隐状态概率
的概率,即初始隐状态概率
而初始状态可表示如下:p(y1丨π),给定π,初始状态y1的取值分布就确定了
状态转移概率矩阵
初始状态确定之后,如何转移到初始状态的下一个状态呢?
还记得马尔可夫假设第一条吗?t+1时刻的状态只取决于t时刻状态
我们上面提到了指的是隐状态从时刻转向时刻的概率
比如说我们现在实体标签一共有 种, 也就是
种, 也就是 (注意
(注意 是所有可能的实体标签种类的集合), 也就是
是所有可能的实体标签种类的集合), 也就是

(注意我们实体标签编号从 算起)。
算起)。
假设在时刻任何一种实体标签都可以在时刻转换为任何一种其他类型的实体标签
由排列组合不难得出以下结论:总共可能的转换的路径有 种, 所以我们可以做一个
种, 所以我们可以做一个 的矩阵来表示所有可能的隐状态转移概率.
的矩阵来表示所有可能的隐状态转移概率.

图片出处:https://github.com/aespresso/a_journey_into_math_of_ml
如图所示即为状态转移概率矩阵,设矩阵为 矩阵, 则
矩阵, 则 表示矩阵中第i行第j列:
表示矩阵中第i行第j列:

该表达式的含义:
某时刻实体具有一个标签,而下一时刻该标签转换到某标签的概率,即时刻实体标签为, 而在 时刻实体标签转换到
时刻实体标签转换到 的概率
的概率
发射概率矩阵
回到最初的问题,有了(隐)状态yt之后,如何确定观测xt的概率分布呢?
根据尔可夫假设第二条,任意时刻观测只依赖于当前时刻的隐状态, 也叫做发射概率,描述了隐状态生成观测结果的过程
设我们的字典里有 个字,
个字,

(注意这里下标从0算起, 所以最后的下标是 , 一共有种观测), 则每种实体标签(隐状态)可以生成种不同的汉字(也就是观测), 这一过程可以用一个发射概率矩阵来表示, 它的维度是
, 一共有种观测), 则每种实体标签(隐状态)可以生成种不同的汉字(也就是观测), 这一过程可以用一个发射概率矩阵来表示, 它的维度是
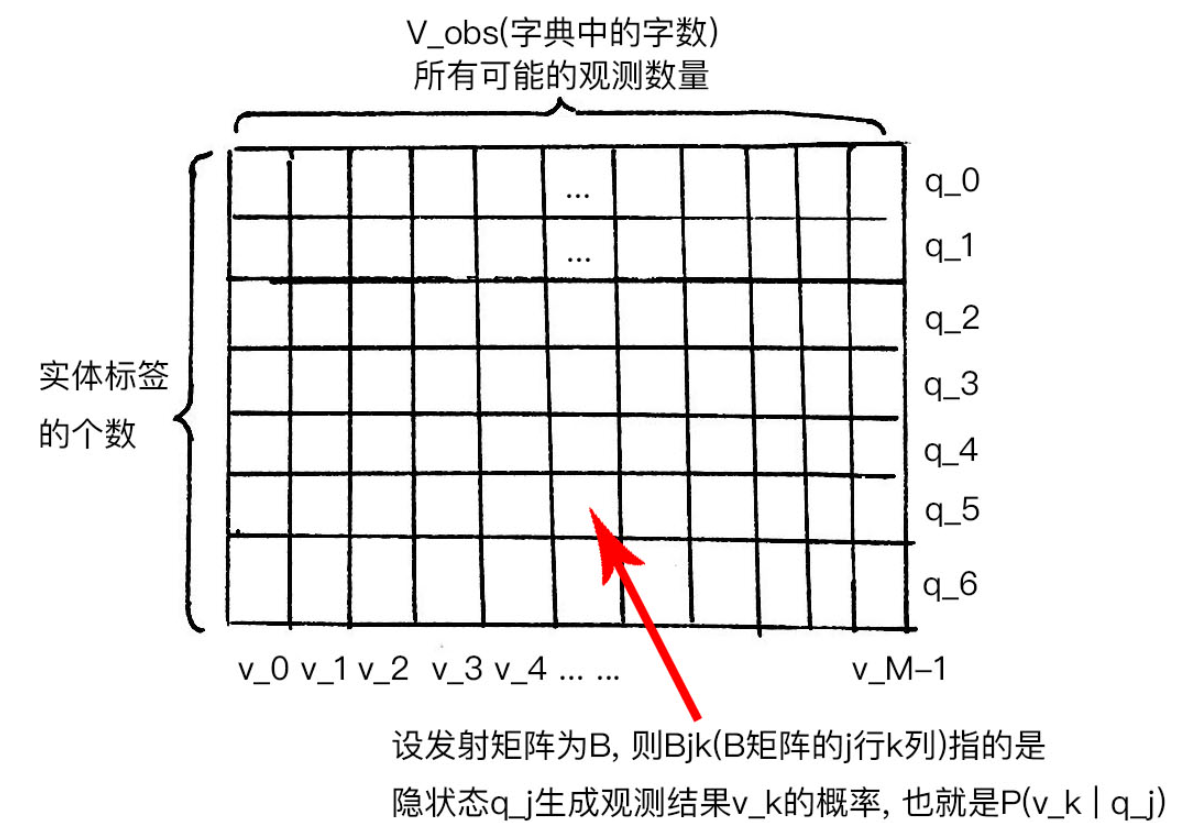
图片出处:https://github.com/aespresso/a_journey_into_math_of_ml
设这个矩阵为 矩阵, 则
矩阵, 则 表示矩阵中第
表示矩阵中第 行第
行第 列:
列:

该表达式的含义:
在时刻由实体标签(隐状态)生成汉字(观测结果) 的概率.
的概率.
至此,HMM的概念部分基本介绍完毕