Mat src = imread("D:/opencv��ϰͼƬ/�����.jpg");
imshow("ԭͼƬ", src);
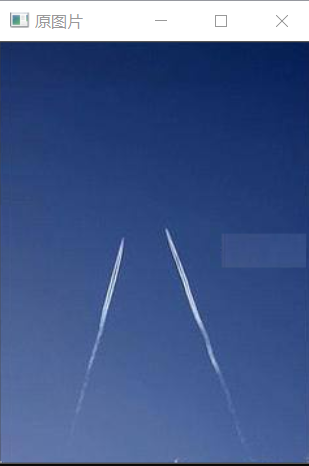
// ��ֵ��
Mat dst, gray, binary;
cvtColor(src, gray, COLOR_BGR2GRAY);
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
// ��̬ѧȥ������
Mat k = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(binary, binary, MORPH_OPEN, k);
imshow("binary", binary);
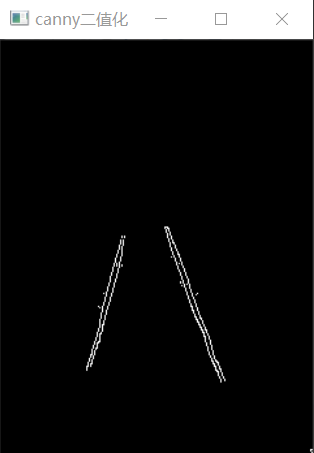
// �������������
vector<vector<Point>> contours;
findContours(binary, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE, Point());
for (size_t t = 0; t < contours.size(); t++) {
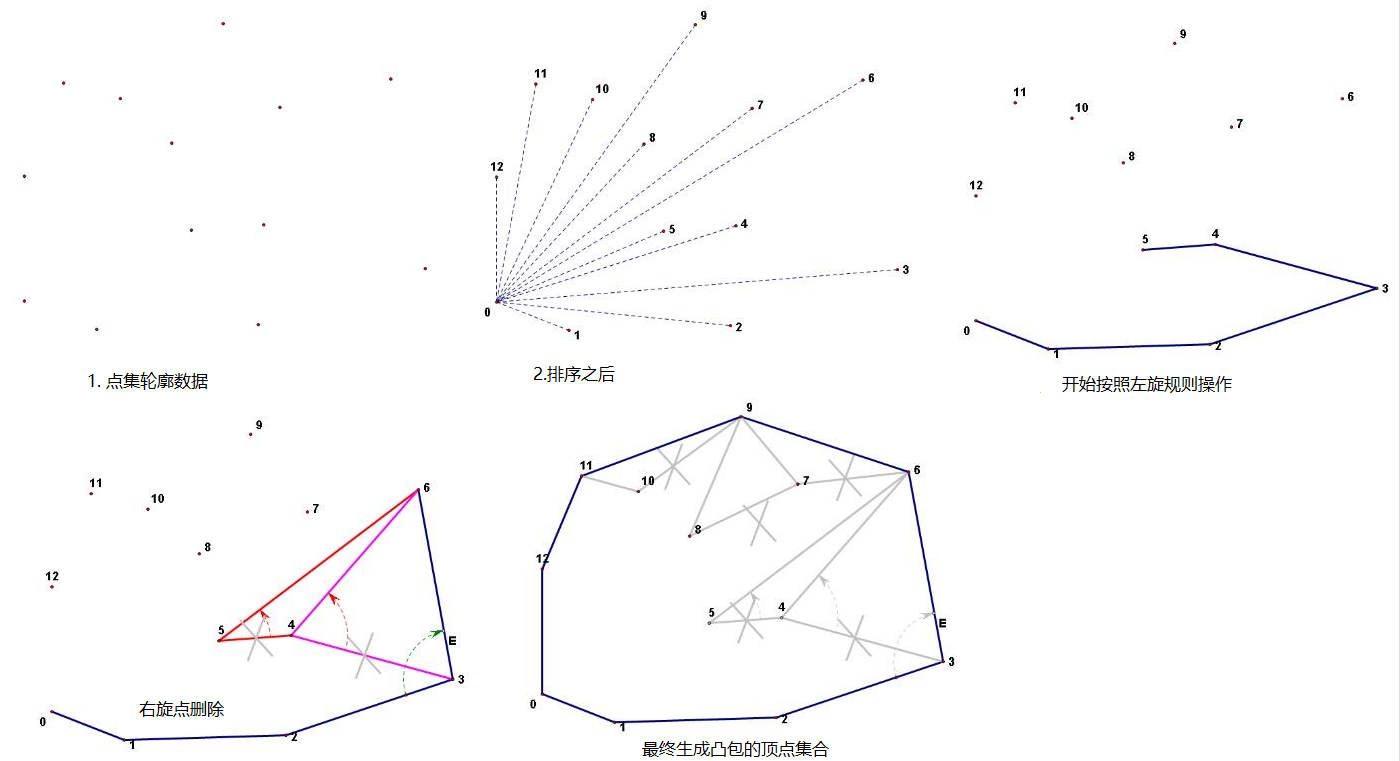
vector<Point> hull;
convexHull(contours[t], hull);//�����
bool isHull = isContourConvex(contours[t]);//�ж������Ƿ�Ϊ��
printf("test convex of the contours %s", isHull ? "Y" : "N");
int len = hull.size();
//������
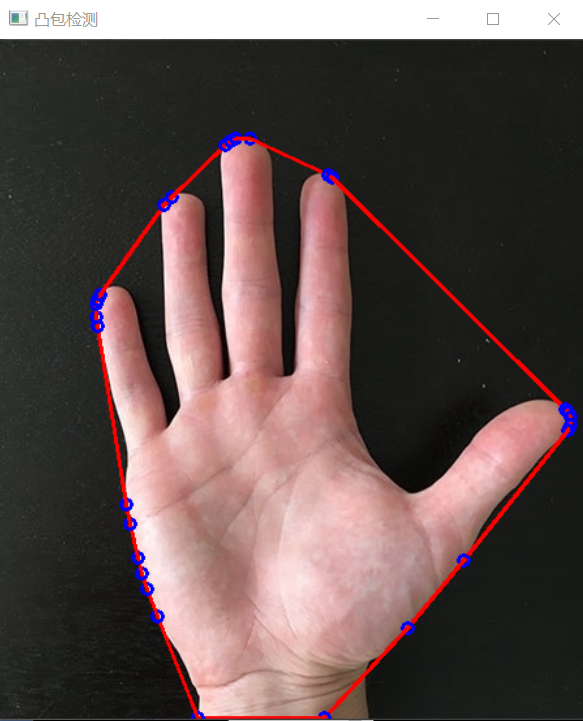
for (int i = 0; i < hull.size(); i++) {
circle(src, hull[i], 4, Scalar(255, 0, 0), 2, 8, 0);//��
line(src, hull[i%len], hull[(i + 1) % len], Scalar(0, 0, 255), 2, 8, 0);//��
}
}
imshow("�����", src);