��Ϊh == null�Ļ���Head��û��ʼ������ʼ����£�head == null����һ���ڵ���ӣ�Head�ᱻ��ʼ��һ������ڵ㡣����˵�����������û���ü���ӣ��ͻ����head == null �������
private void unparkSuccessor(Node node) {
// ��ȡͷ���waitStatus
int ws = node.waitStatus;
if (ws < 0)
compareAndSetWaitStatus(node, ws, 0);
// ��ȡ��ǰ�ڵ����һ���ڵ�
Node s = node.next;
//����¸��ڵ���null�����¸��ڵ㱻cancelled�����ҵ������ʼ�ķ�cancelled�Ľڵ�
if (s == null || s.waitStatus > 0) {
s = null;
// �ʹ�β���ڵ㿪ʼ����ǰ�������ҵ������е�һ��waitStatus<0�Ľڵ㡣
for (Node t = tail; t != null && t != node; t = t.prev)
if (t.waitStatus <= 0)
s = t;
}
// �����ǰ�ڵ���¸��ڵ㲻Ϊ�գ�����״̬<=0���Ͱѵ�ǰ�ڵ㻽��
if (s != null)
LockSupport.unpark(s.thread);
}
ΪʲôҪ�Ӻ���ǰ�ҵ�һ����Cancelled�Ľڵ��أ�
��һ��addWaiter����
private Node addWaiter(Node mode) {
Node node = new Node(Thread.currentThread(), mode);
Node pred = tail;
if (pred != null) {
node.prev = pred;
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
enq(node);
return node;
}
���Ǵ�������Կ������ڵ���Ӳ�����ԭ�Ӳ�����Ҳ����˵��node.prev = pred, compareAndSetTail(pred, node) �������ط����Կ���Tail��ӵ�ԭ�Ӳ��������Ǵ�ʱpred.next = node;��ûִ�У�������ʱ��ִ����unparkSuccessor��������û�취��ǰ�������ˣ�������Ҫ�Ӻ���ǰ�ҡ�����һ��ԭ���ڲ���CANCELLED״̬�ڵ��ʱ���ȶϿ�����Nextָ�룬Prevָ�벢δ�Ͽ������Ҳ�DZ���Ҫ�Ӻ���ǰ�������ܹ�������ȫ����Node��
���ԣ�����Ǵ�ǰ�����ң����ڼ����������ӵķ�ԭ�Ӳ�����CANCELLED�ڵ���������жϿ�Nextָ��IJ��������ܻᵼ�����������еĽڵ������ԣ����Ѷ�Ӧ���̺߳�Ӧ���߳̾ͻ��������ִ�С�
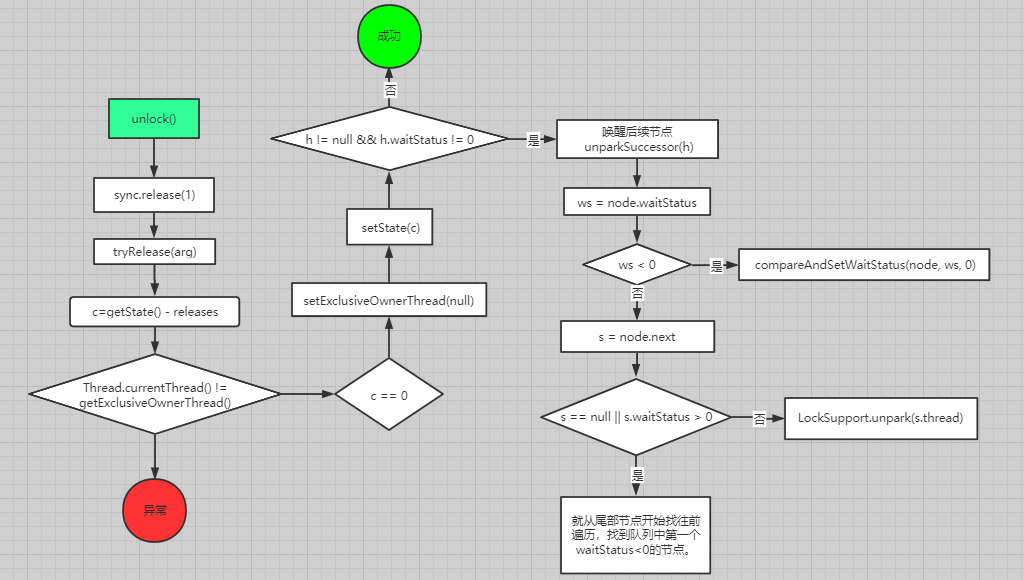
4.2 �ͷ�������ͼ
5.ע��
��һƪ���Ⲣ�����߰��µ�LockSupport,лл��ҵĹ�ע��֧�֣�������ϣ�����ָ������ͬ����!!!