ФПТМ
- 1. ЪТМўМЏЕФЪЙгУ
- 1.1 ЪТМўМЏПижЦПщ
- 1.2 ЪТМўМЏВйзї
- 2. гЪЯфЕФЪЙгУ
- 2.1 гЪЯфПижЦПщ
- 2.2 гЪЯфЕФВйзї
- 3. ЯћЯЂЖгСа
- 3.1 ЯћЯЂЖгСаПижЦПщ
- 3.2 ЯћЯЂЖгСаЕФВйзї
- 4. ШэМўЖЈЪБЦї
- 4.1 ЖЈЪБЦїФЃЪН
- 4.1.1 HARDTIMERФЃЪН
- 4.1.2 SOFTTIMERФЃЪН
- 4.2 ШэМўЖЈЪБЦїПижЦПщ
- 4.3 ШэМўЖЈЪБЦїЕФВйзї
- 5. ФкДцГи
- 5.1 ФкДцГиПижЦПщ
- 5.2 ФкДцГиВйзї
- ВЮПМЮФЯз
1. ЪТМўМЏЕФЪЙгУ
ЕЅИіжИЖЈЪТМўЛНабЯпГЬЃЌШЮвтЪТМўЛНабЯпГЬЃЌЖрИіжИЖЈЪТМўвЛЦ№ЛНабЯпГЬЁЃаХКХСПжївЊгУгкЁАвЛЖдвЛЁБЕФЯпГЬЭЌВНЃЌЕБашвЊЁАвЛЖдЖрЁБЁЂЁАЖрЖдвЛЁБЁЂЁАЖрЖдЖрЁБЕФЭЌВНЪБЃЌОЭашвЊЪТМўМЏРДДІРэСЫЁЃRT-ThreadжаЕФЪТМўМЏгУвЛИі32ЮЛЮоЗћКХећаЭБфСПРДБэЪОЃЌБфСПжаЕФвЛИіЮЛДњБэвЛИіЪТМўЃЌЯпГЬЭЈЙ§ЁАТпМгыЁБЛђЁАТпМЛђЁБгывЛИіЛђЖрИіЪТМўНЈСЂЙиСЊаЮГЩвЛИіЪТМўзщКЯЁЃ
- ЪТМўЕФЁАТпМЛђЁБвВГЦЮЊЪЧЖРСЂаЭЭЌВНЃЌжИЕФЪЧЯпГЬгыШЮКЮЪТМўжЎвЛЗЂЩњЭЌВНЃЌжЛвЊгавЛИіЪТМўЗЂЩњЃЌМДТњзуЬѕМў
- ЪТМўЕФЁАТпМгыЁБЃЌвВГЦЮЊЪЧЙиСЊаЭЭЌВНЃЌжИЕФЪЧЯпГЬгыШєИЩЪТМўЖМЗЂЩњЭЌВНЃЌжЛгаетаЉЪТМўШЋВПЗЂЩњЃЌВХТњзуЬѕМў
1.1 ЪТМўМЏПижЦПщ
struct rt_event
{
struct rt_ipc_object parent; // Дгipc_objectМЬГаЖјРД
rt_uint32_t set; // ЪТМўМЏ set
}
typedef struct rt_event *rt_event_t;
ОВЬЌЪТМўМЏЃКstruct rt_event static_evt;
ЖЏЬЌЪТМўМЏЃКrt_event_t dynamic_evt;
1.2 ЪТМўМЏВйзї
- ГѕЪМЛЏгыЭбРы
ОВЬЌЪТМўМЏВйзї
rt_err_t rt_event_init(rt_event_t event, const char *name, rt_uint8_t falg) //ЩЯЭЌ
rt_err_t rt_event_detach(rt_event_t event)
- ДДНЈгыЩОГ§
ЖЏЬЌЪТМўМЏВйзї
rt_event_t rt_event_create(const char *name, rt_uint8_t flag)
rt_err_t rt_event_delete(rt_event event)
- ЗЂЫЭЪТМў
// setЕФжЕЮЊ0x01дђДњБэЕк0ИіЪТМўЗЂЩњСЫЃЌ0x08дђДњБэЕк3ИіЪТМўЗЂЩњСЫ
// 1 << 0, 1 << 3
rt_err_t rt_event_send(rt_event_t event, rt_uint32_t set)
- НгЪмЪТМў
rt_err_t rt_event_recv(rt_event_t event, rt_uint32_t_t set, rt_uint8_t option, rt_int32_t timeout, rt_uint32_t *recved)
// setЕФжЕБэЪОЖдФФИіЪТМўИааЫШЄЁЃР§Шч0x01 | 0x08ЃЌдђБэЪОЖдЕк0ИіЪТМўКЭЕк3ИіЪТМўИааЫШЄ
// option:
RT_EVENT_FLAG_ANDЃКЖМЗЂЩњВХЛНаб
RT_EVENT_FLAG_ORЃКгавЛИіЗЂЩњОЭЛНаб
RT_EVENT_FLAG_CLEARЃКЯпГЬЛНабКѓЃЌЯЕЭГЛсНЋЪТМўЕФsetЖдгІЕФЮЛЧхСуЁЃЗёдђЯЕЭГВЛЛсЧхГ§ЖдгІЮЛ
// timeout: ЩЯЭЌ
// recved: БЃДцНгЪеЕНЕФЪТМўset
2. гЪЯфЕФЪЙгУ
гЪЯфгУгкЯпГЬМфЭЈаХЃЌЬиЕуЪЧПЊЯњБШНЯЕЭЃЌаЇТЪНЯИпЁЃгЪЯфжаЕФУПвЛЗтгЪМўжЛФмШнФЩЙЬЖЈЕФ4зжНкФкШнЃЈеыЖд32ЮЛДІРэЯЕЭГЃЌжИеыЕФДѓаЁМДЮЊ4ИізжНкЃЌЫљвдвЛЗтгЪМўЧЁКУФмЙЛШнФЩвЛИіжИеыЃЉЁЃЯпГЬЛђжаЖЯЗўЮёР§ГЬАбвЛЗт4зжНкГЄЖШЕФгЪМўЗЂЫЭЕНгЪЯфжаЃЌЖјЦфЫћашвЊЕФЯпГЬПЩвдДггЪЯфжаНгЪметаЉгЪМўВЂНјааДІРэ

2.1 гЪЯфПижЦПщ
struct rt_mailbox
{
struct rt_ipc_object parent; //ДгIPCЖдЯѓМЬГаЖјРД
rt_uint32_t *msg_pool; //жИЯђгЪЯфЯћЯЂЕФЛКГхЧјЕФЕижЗ
rt_uint16_t size; //гЪЯфЕФШнСПЃЌПЩвдЗХЖрЩйИігЪМў
rt_uint16_t entry; // гЪЯфжагЪМўЕФЪ§ФП
rt_uint16_t in_offset; // гЪЯфНјЦЋвЦСП
rt_uint16_t out_offset; // гЪЯфГіЦЋвЦСП
rt_list_t suspend_sender_thread; // МЧТМСЫЙвЦ№дкИУгЪЯфЕФЯпГЬЁЃБШШчгЪЯфТњСЫЃЌетаЉЯпГЬОЭВЛФмЗЂСЫЃЌвЊЙвЦ№ЕШД§
}
typedef struct rt_mailbox *rt_mailbox_t;
ОВЬЌгЪЯфЃКstruct rt_mailbox static_mb;
ЖЏЬЌгЪЯфЃКrt_mailbox_t dynamic_mb;
2.2 гЪЯфЕФВйзї
- ГѕЪМЛЏгыЭбРы
// ОВЬЌгЪЯфЁЃflag: RT_IPC_FLAG_FIFO, RT_IPC_FLAG_PRIO
// ШчЙћsize=10,дђ msgpoolОЭвЊга4 * 10 = 40byteЕФПеМф
rt_err_t rt_mb_init(rt_mailbox_t mb, const char *name, void *msgpool, rt_size_t size, rt_uint8_t flag)
rt_err_t rt_mb_detach(rt_mailbox_t mb)
- ДДНЈгыЩОГ§
// ЖЏЬЌгЪЯф
rt_mailbox_t rt_mb_create(const char *name, rt_size_t size, rt_uint8_t flag)
rt_err_t rt_mbdelete(rt_mailbox_t mb)
- ЗЂЫЭгЪМў
// valueОЭЪЧгЪМўЕФФкШнЃЌ4зжНкЁЃШчЙћЗЂЫЭЕФФкШн<4зжНкЃЌдђжБНгИГжЕИјvalueМДПЩЃЌШчЙћКмЖрЃЌФЧУДПЩвдДЋЫЭЕижЗЁЃ
// ШчЙћгЪЯфвбОТњСЫЃЌФЧУДЛсжБНгЗЕЛиДэЮѓ
// ПЩвддкЯпГЬКЭжаЖЯжаЕїгУ
rt_err_t rt_mb_send(rt_mailbox_t mb, rt_uint32_t value);
// ШчЙћгЪЯфТњСЫЃЌдђзюЖрЕШД§timeoutЪБМфЁЃ
// жЛФмдкЯпГЬжаЕїгУЃЌвђЮЊЫќЛсдьГЩзшШћ
rt_err_t rt_mb_send_wait(rt_mailbox_t mb, rt_uint32_t value, rt_int32_t timeout)
- НгЪегЪМў
rt_err_t rt_mb_recv(rt_mailbox_t mb, rt_uint32_t *value, rt_int32_t timeout)
3. ЯћЯЂЖгСа
ЯћЯЂЖгСаЪЧRT-ThreadСэвЛжжГЃгУЕФЯпГЬМфЭЈаХЗНЪНЃЌЯћЯЂЖгСаЪЧЖдгЪЯфЕФРЉеЙЁЃЯћЯЂЖгСаФмЙЛНгЪеРДздЯпГЬЛђжаЖЯЗўЮёР§ГЬжаЗЂГіЕФВЛЙЬЖЈГЄЖШЕФЯћЯЂЃЌВЂАбЯћЯЂЛКДцдкздМКЕФФкДцПеМфжаЃЌЖјЦфЫќЯпГЬФмЙЛДгЯћЯЂЖгСажаЖСШЁЯргІЕФЯћЯЂЃЌВЂНјааЯргІЕФДІРэЁЃжЇГжНєМБЯћЯЂЗЂЫЭЃЌМДНЋНєМБЯћЯЂСДНгЕНЯћЯЂСаБэСДБэЭЗЁЃЕБЯћЯЂЖгСаТњЃЌЛЙЭљЯћЯЂЖгСаЗЂЫЭЯћЯЂЃЌИУЗЂЫЭОЭЛсЪЇАмЁЃЕБЯћЯЂЖгСаПеЃЌЛЙДгЯћЯЂЖгСаНгЪеЯћЯЂЃЌИУНгЪеОЭЛсЪЇАмЁЃ
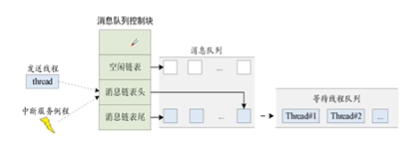
3.1 ЯћЯЂЖгСаПижЦПщ
struct rt_messagequeue
{
struct rt_ipc_object parent; // МЬГаздIPCЖдЯѓ
void *msg_pool; // жИЯђЯћЯЂЖгСаПеМфЕФЕижЗ
rt_uint16_t msg_size; // ЯћЯЂзюДѓГЄЖШ.дкrtconfig.h жаЖЈвхЖдЦфзжНкЃЌвЛАуЪЧ4зжНкЖдЦыЁЃвђДЫзюаЁЮЊ4ЃЌгІЩшжУЮЊ4ЕФБЖЪ§
rt_uint16_t max_msgs; // ЯћЯЂЖгСаШнСП,ФмШнФЩзюЖрЯћЯЂИіЪ§ЁЃР§ШчЩшжУmsg_poolЕФДѓаЁЮЊ1024byte,ФЧУДmax_msgs = 1024 / (msg_size + 4жИеыЕижЗ) = 1024/8
rt_uint16_t entry; // ЯћЯЂЖгСажаЯћЯЂИіЪ§
void *msg_queue_head; // ЯћЯЂЖгСаЭЗжИеы
void *msg_queue_tail; // ЯћЯЂЖгСаЮВжИеы
void *msg_queue_free; // ЯћЯЂЖгСаЮДБЛЪЙгУЕФЯћЯЂПђ
}
typedef struct rt_messagequeue *rt_mq_t;
ОВЬЌЯћЯЂЖгСаЃКstruct rt_messagequeue static_mq
ЖЏЬЌЯћЯЂЖгСаЃКrt_mq_t dynamic_mq
3.2 ЯћЯЂЖгСаЕФВйзї
- ГѕЪМЛЏгыЭбРы
rt_err_t rt_mq_init(rt_mq_t mq, const char *name, void *msgpool, rt_size_t msg_size, rt_size_t pool_size, rt_uint8_t flag) // RT_IPC_FLAG_FIFO, RT_IPC_FLAG_PRIO
rt_err_t rt_mq_detach(rt_mq_t mq)
- ДДНЈгкЩОГ§
rt_mq_t rt_mq_create(const char *name, rt_size_t msg_size, rt_size_t max_msgs, rt_uint8_t flag)
rt_err_t rt_mq_delete(rt_mq_t mq)
- ЗЂЫЭЯћЯЂ
// size <= msg_size.НЋЯћЯЂЗХдкЮВВП
rt_err_t rt_mq_send(rt_mq_t mq, void *buffer, rt_size_t size)
// НєМБЯћЯЂЃЌЯћЯЂЗХдкСаБэЭЗВП
rt_err_t rt_mq_urgent(rt_mq_t mq, void *buffer, rt_size_t size)
- НгЪеЯћЯЂ
// timeoutВЛЕШгк0ЃЌдђЪеВЛЕНЯћЯЂОЭЛсЙвЦ№
rt_err_t rt_mq_recv(rt_mq_t mq, void *buffer, rt_size_t size, rt_int32_t timeout)
4. ШэМўЖЈЪБЦї
ШэМўЖЈЪБЦїЪЧгЩВйзїЯЕЭГЬсЙЉЕФвЛРрЯЕЭГНгПкЃЌЙЙНЈдкгВМўЖЈЪБЦїЛљДЁжЎЩЯЃЈЯЕЭГЕЮД№ЖЈЪБЦїЃЉЃЌШэМўЖЈЪБЦїЪЙЯЕЭГФмЙЛЬсЙЉВЛЪмЪ§ФПЯожЦЕФЖЈЪБЦїЗўЮёЁЃRT-ThreadЬсЙЉЕФШэМўЖЈЪБЦїЃЌвдЯЕЭГНкХФЃЈOS TickЃЉЕФЪБМфГЄЖШЮЊЖЈЪБЕЅЮЛЃЌЬсЙЉСЫЛљгкЯЕЭГНкХФећЪ§БЖЕФЖЈЪБФмСІЃЌМДЖЈЪБЦїЪ§жЕЪЧOS TickЕФећЪ§БЖЁЃР§ШчвЛИіOS TickЪЧ10msЃЌФЧУДЩЯВуШэМўЖЈЪБЦїжЛФмЬсЙЉ10ЕФБЖЪ§ЕФЖЈЪБЁЃЕНЪБжЎКѓЃЌЛсЕїгУгУЛЇЩшжУЕФЛиЕїКЏЪ§
4.1 ЖЈЪБЦїФЃЪН
4.1.1 HARDTIMERФЃЪН
ГЌЪБКЏЪ§дкжаЖЯЩЯЯТЮФЛЗОГжажДааЁЃДЫФЃЪНдкЖЈЪБЦїГѕЪМЛЏЪБжИЖЈЁЃЖдгкГЌЪБКЏЪ§ЕФвЊЧѓКЭжаЖЯЗўЮёР§ГЬЕФвЊЧѓЯрЭЌЁЃжДааЪБМфгІИУОЁСПЖЬЃЌжДааЪБВЛгІЕМжТЕБЧАЩЯЯТЮФЙвЦ№ЃЌHARD_TIMERФЃЪНЪЧRT-ThreadШэМўЖЈЪБЦїЕФФЌШЯЗНЪН
4.1.2 SOFTTIMERФЃЪН
ГЌЪБКЏЪ§дкЯЕЭГtimerЯпГЬЕФЯпГЬЩЯЯТЮФжажДааЁЃЭЈЙ§КъЖЈвхRT_USING_TIMER_SOFTРДОіЖЈЪЧЗёЦєгУИУФЃЪНЁЃЕБЦєЖЏSOFTTIMERФЃЪНКѓЃЌПЩвддкЖЈЪБЦїГѕЪМЛЏЪБжИЖЈЖЈЪБЦїЙЄзїдкSOFTTIMERФЃЪН
4.2 ШэМўЖЈЪБЦїПижЦПщ
struct rt_timer
{
struct rt_object parent; // ДгЯЕЭГЖдЯѓМЬГаЖјРД
rt_list_t row[RT_TIMER_SKIP_LIST_LEVEL]; // ЯЕЭГЖЈЪБЦїСДБэ
void (*timeout_func)(void *parameter); // ГЌЪБЛиЕїКЏЪ§
void *parameter; // ЛиЕїКЏЪ§ЪфШыВЮЪ§
rt_tick_t init_tick; // жИЖЈГЌЪБЕФЪБжгНкХФЁЃР§Шч60 * 10 = 600ms
rt_tick_t timeout_tick; // ЯЕЭГдкГЌЪБЪБЕФЯЕЭГНкХФ
};
typedef struct rt_timer *rt_timer_t;
ОВЬЌШэМўЖЈЪБЦїЃКstruct rt_timer static_timer
ЖЏЬЌШэМўЖЈЪБЦїЃКrt_timer_t dynamic_timer
4.3 ШэМўЖЈЪБЦїЕФВйзї
- ГѕЪМЛЏгыЭбРы
void rt_timer_init(rt_timer_t timer, const char *name, void(*timeout)(void *parameter), void *parameter, rt_tick_t time, rt_uint8_t flag);
// RT_TIMER_FLAG_ONE_SHOT, RT_TIMER_FLAG_PERIODIC, RT_TIMER_FLAG_HARD_TIMER, RT_TIMER_FLAG_SOFT_TIMER
Ек1КЭЕк2ИібЁвЛИі | Ек3КЭЕк4ИібЁвЛИі
// УЛгаЛиЕїВЮЪ§ОЭДЋRT_NULL
rt_err_t rt_timer_detach(rt_timer_t timer)
- ДДНЈгыЩОГ§
rt_timer_t rt_timer_create(const char *name, void(*timeout)(void *parameter), void *parameter, rt_tick_t time, rt_uint8_t flag)
rt_err_t rt_timer_delete(rt_timer_t timer)
- ЦєЖЏЖЈЪБЦї
rt_err_t rt_timer_start(rt_timer_t timer)
- ЭЃжЙЖЈЪБЦї
rt_err_t rt_timer_stop(rt_timer_t timer)
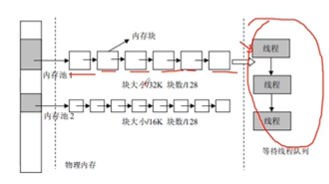
5. ФкДцГи
ЖЏЬЌФкДцЖбПЩвдЗжХфШЮвтДѓаЁЕФФкДцПщЃЌЗЧГЃСщЛюКЭЗНБуЃЌЕЋЦфДцдкУїЯдЕФШБЕуЃКвЛЪЧЗжХфаЇТЪВЛИпЃЌдкУПДЮЗжХфЪБЃЌЖМвЊНјааПеЯаФкДцПщВщевЃЛЖўЪЧШнвзВњЩњФкДцЫщЦЌЁЃЮЊСЫЬсИпФкДцЗжХфаЇТЪЃЌВЂЧвБмУтФкДцЫщЦЌЃЌRT-ThreadЬсЙЉСЫСэвЛжжФкДцЙмРэЗНЗЈЃКФкДцГиЁЃФкДцГиЪЧвЛжжФкДцЗжХфЗНЪНЃЌгУгкЗжХфДѓСПДѓаЁЯрЭЌЕФаЁФкДцПщЃЌЪЙгУФкДцГиПЩвдМЋДѓЕФМгПьФкДцЗжХфгыЪЭЗХЕФЫйЖШЃЌЧвФмОЁСПБмУтФкДцЫщЦЌЛЏЁЃRT-ThreadЕФФкДцГижЇГжЯпГЬЙвЦ№ЃЌЕБФкДцГиЮоПеЯаФкДцПщЪБЃЌЩъЧыЯпГЬЛсБЛЙвЦ№ЃЌжБЕНФкДцГижагааТЕФПЩгУФкДцПщЃЌдйНЋЙвЦ№ЕФЯпГЬЛНабЁЃЛљгкетИіЬиЕуФкДцГиЗЧГЃЪЪКЯашвЊЭЈЙ§ФкДцзЪдДНјааЭЌВНЕФГЁОАЁЃ
5.1 ФкДцГиПижЦПщ
struct rt_mempool
{
struct rt_object parent; // ДгЯЕЭГЖдЯѓМЬГа
void *start_address; // ФкДцГиЦ№ЪМЕижЗ
rt_size_t size; // ФкДцГиДѓаЁ
rt_size_t block_size; // ФкДцГижавЛИіФкДцПщДѓаЁ
rt_uint8_t *block_list; // ФкДцГижааЁФкДцПщСДБэ
rt_size_t block_total_count; // МЧТМФкДцГижаФмШнФЩЖрЩйаЁФкДцПщ
rt_size_t block_free_count; // ФкДцГижаПеЯаФкДцПщИіЪ§
rt_list_t suspend_thread; // ЙвдидкИУзЪдДЩЯЕФЯпГЬ
rt_size_t suspend_thread_count; // ЙвдидкИУзЪдДЩЯЕФЯпГЬИіЪ§
};
typedef struct rt_mempool *rt_mp_t;
ОВЬЌФкДцГиЃКstruct rt_mempool static_mp;
ЖЏЬЌФкДцГиЃКrt_mp_t dynamic_mp;
5.2 ФкДцГиВйзї
- ГѕЪМЛЏгыЭбРы
ОВЬЌФкДцГи
// block_sizeШдШЛвЊзёбзжНкЖдЦыЁЃР§Шч4зжНкЖдЦыЃЌОЭБиаыЩшжУГЩ4ЕФећЪ§БЖЁЃгаСЫblock_sizeКЭsizeОЭПЩвдМЦЫуФкДцПщЪ§СП=size/(block_size + 4)ЁЃЦфжа4ЮЊжИеыДѓаЁ
rt_err_t rt_mp_init(struct rt_mempool *mp, const char *name, void *start, rt_size_t size, rt_size_t block_size)
rt_err_t rt_mp_detach(struct rt_mempool *mp)
- ДДНЈгыЩОГ§
rt_mp_t rt_mp_create(const char *name, rt_size_t block_count, rt_size_t block_size)
rt_err_t rt_mp_delete(rt_mp_t mp)
- ЩъЧыФкДцПщ
// timeВЮЪ§ЮЊ0ЃЌдђСЂПЬЗЕЛиНсЙћЃЌШчЙћtimeДѓгк0ЃЌдђЮоФкДцПщЛсЙвЦ№ЯпГЬЃЌШчЙћtimeаЁгк0ЃЌдђЮоФкДцПщЛсвЛжБЙвЦ№ЯпГЬЃЌжБЕНгаФкДцПщ
void *rt_mp_alloc(rt_mp_t mp, rt_int32_t time)
- ЪЭЗХФкДцПщ
// ЪфШыФкДцПщЕФЕижЗ
void rt_mp_free(void *block)
ВЮПМЮФЯз
- RT-ThreadЪгЦЕжааФФкКЫШыУХ
- RT-ThreadЮФЕЕжааФ
БОЮФзїеп: CrazyCatJack
БОЮФСДНг: https://www.cnblogs.com/CrazyCatJack/p/14408849.html
АцШЈЩљУї:БОВЉПЭЫљгаЮФеТГ§ЬиБ№ЩљУїЭтЃЌОљВЩгУ BY-NC-SA аэПЩавщЁЃзЊдиЧызЂУїГіДІЃЁ
ЙизЂВЉжї:ШчЙћФњОѕЕУИУЮФеТЖдФњгаАяжњЃЌПЩвдЕуЛїЮФеТгвЯТНЧЭЦМівЛЯТЃЌФњЕФжЇГжНЋГЩЮЊЮвзюДѓЕФЖЏСІЃЁ
bk