ǰ�Խ���
�ɲ�Ʒ��ϵͳƽ̨���ֳ���ʾ,��д����Ӧ�÷�����,��дͶ������ļ������������;ͨ��,�����ǿ���һ��ͼƬʱ,����ͼƬ�о۽�һ�����㡣���������һ����,һ��������������һ��Ͱ�� ����û�о۽�������Ȼ������,����ȴ������ɫ��������������Ϊƽ�������������ע������������ͼ��ʱ,����ϣ����ͼ���зָ������Ȥ�Ķ��������������ʽͼ���ʾ��,����̽���˴�����ʽͼ��ķָ��,Ҳ��Ϊ�����Ե�ͼ��ָ
���������ַ:https://github.com/YouthJourney/Computer-Vision-OpenCV/tree/master/image_segmentation
![[����ͼƬת��ʧ��,Դվ�����з���������,���齫ͼƬ��������ֱ���ϴ�(img-wQaTbA2u-1603161896670)(en-resource://database/963:1)]](http://style.iis7.com/uploads/2021/09/21352765298.png)
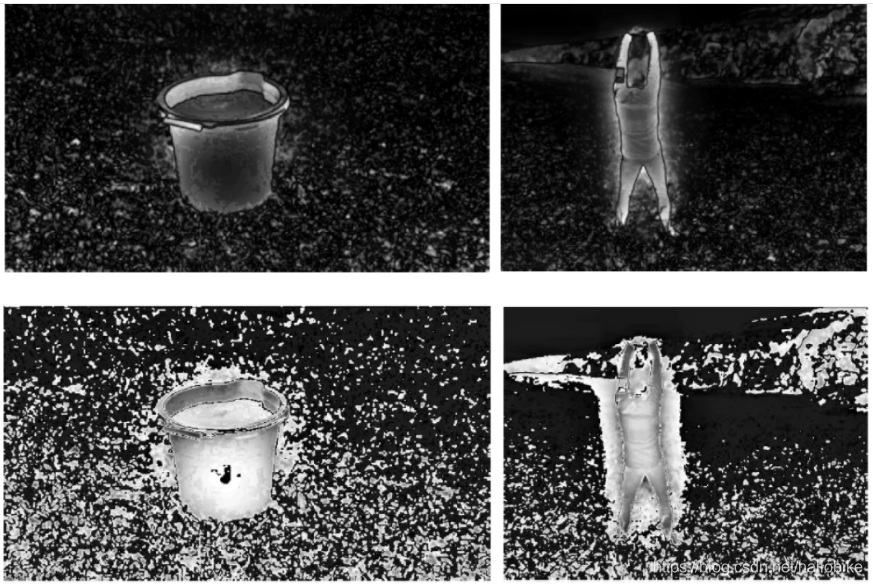
�������ͼ����,Ͱ(��)����(��)�Ǹ���Ȥ�Ķ���
�ʼ�ķָʽ��Դ��ϣ���ܹ�����Ѱ��ͼ���е�Trimap��Trimap��ͼ������(mask),���������㷨���ʹ��ʱ,�����ڷָ�ͼ��,ͬʱ�ܹ���ʾǰ���ͱ���֮���ϸ�ڡ�Trimapͨ����������ǰ���İ�ɫ����,���屳���ĺ�ɫ�����Լ�������ȷ������Ļ�ɫ��������ʽ����ͼ��ʾ��
![[����ͼƬת��ʧ��,Դվ�����з���������,���齫ͼƬ��������ֱ���ϴ�(img-HdFEfk2Y-1603161896674)(en-resource://database/965:1)]](http://style.iis7.com/uploads/2021/09/21352865299.png)
�ַָ�ͼ��ʹ�õľ��ǿ�ͼ�㷨,������������,���������û��Լ��ṩTrimap,����ر��ʱ���Ҳ�һ��ȷ��������Ҫ����������������Trimap�ķ�����
1���Ƚϼ��ײ�����ʵ�ֵķ���,ȱ������������ȫ������,Ҫ���û�ΪGrabcut�㷨�ṩһ������������������Ϊ������������,�ܲ����ܺõطָ�Ч����
2��ʹ����ʽ����Ԥ�����Ȥ������ȱ���Ǹ÷����dz�����,�ǽ����ֲ�ͬ����ʽ���㷨�Ľ�������һ��,��������һ���㷨�������˾��������硣������������������ָ������
���ķ���
���ڴ������ʽ��ͼ��ָ�,Ŀ�궼�ǽ�ͼ���ֵ��Ϊ����Ȥ������������Ľ��ܵķ�����Ŀ��Ҳ�������ġ�����,����ȷ������Ȥ�Ķ���������ٽ���˹ģ��Ӧ����ͼ��,֮����ģ��ͼ��������ƽ��15���ش�С �ij����ء���������㷨ּ�ڸ�������������ֵ����ɫ�;������ֽ�ͼ������˵,ʹ���˼����Ե�������(SLIC)�㷨��������ʽ����ͼ��ʾ��
![[����ͼƬת��ʧ��,Դվ�����з���������,���齫ͼƬ��������ֱ���ϴ�(img-3j0SH4bV-1603161896676)(en-resource://database/967:1)]](http://style.iis7.com/uploads/2021/09/21352865300.png)
�����ؽ�ͼ��ֽ�Ϊ������ͬ������������һ���ŵ���,��������������ķ��������ǿ��Լ��賬�����ڵĴ�������ؾ������Ƶ����ԡ�
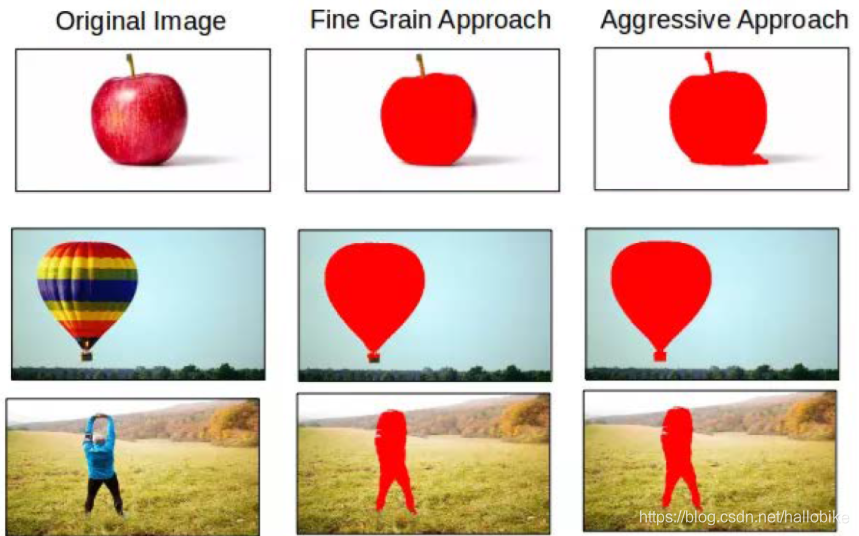
��ȷ��ͼ���еij����ص�ͬʱ,����ͼ�����ʽ��ͼ�������ֲ�ͬ����ʽ�Լ�������һ�ַ���ʹ��OPenCV���õķ���,��ϸ������ʽ��;�ڶ��ַ����漰��ȡϸ������ʽ��ͼ���ƽ��ֵ,Ȼ���ͼ��ĸ�˹ģ���汾�м�ȥƽ��ֵ,���͵õ���ͼ��ľ���ֵ��
��ͼ��ʾ�����ַ�����Ч��,ʹ�ÿ�����ʽ�Է���������ͼ���Ϊ���,���ճ���ͼ��ı߽�;ʹ�ø�˹ģ����ȥƽ��ֵ�ķ���Ҳ�������ͼ���ڲ�,������Ƚ�ǰ��,�����˸���������,��Ҫ��ͼƬ����ȥ�봦����
Ϊ�˽�ͼ���ֵ��,�ԴӲ�ɫͼ�����ɵ�ÿ���������ؽ��е����������ʽͼ���ڸó������������ֵ����ֵ������ֵT1,�����������ؽ�����ֵ��Ϊ��ɫ������,���������ؽ�����Ϊ��ɫ��T1���û�ѡ��,һ�������,��T1����Ϊ��ʽͼ�����������ֵ��25%-30%��
��ͼ����ж�ֵ��֮��,������ʹ�õĵ���ʽ�Լ�����ͼ��������š�����һ�ǽ�ͼ��Ŵ�Ϊƽ���ߴ��������������û�н��зŴ�,��Ϊͼ���д��ڽϴ�����������ڷ��ա������������:
![[����ͼƬת��ʧ��,Դվ�����з���������,���齫ͼƬ��������ֱ���ϴ�(img-aWP55tkb-1603161896682)(en-resource://database/973:1)]](http://style.iis7.com/uploads/2021/09/21352965302.png)
���һ������ȡ����ʹ�õ���������ʽ�ԡ��������ַ����Ľ����,����ȡ���İ�ɫ��������ͨ������
ͼ���е�������ѡ���������������ִ�д˲���,֮�߽����ϵ���ѡ����
����һ���Խ��,��һ����ʽ�Է���ͨ���ᵼ��������Ƭ�������ɱ߽���,������ÿ�IJ�����������������������ɫ�������ӵ��ÿ�ı߽����ӵ�������Щ����,�ڶ�����ʽ�Է�������Ҫ��������ͨ��,����ȡ������ᳬ��������������
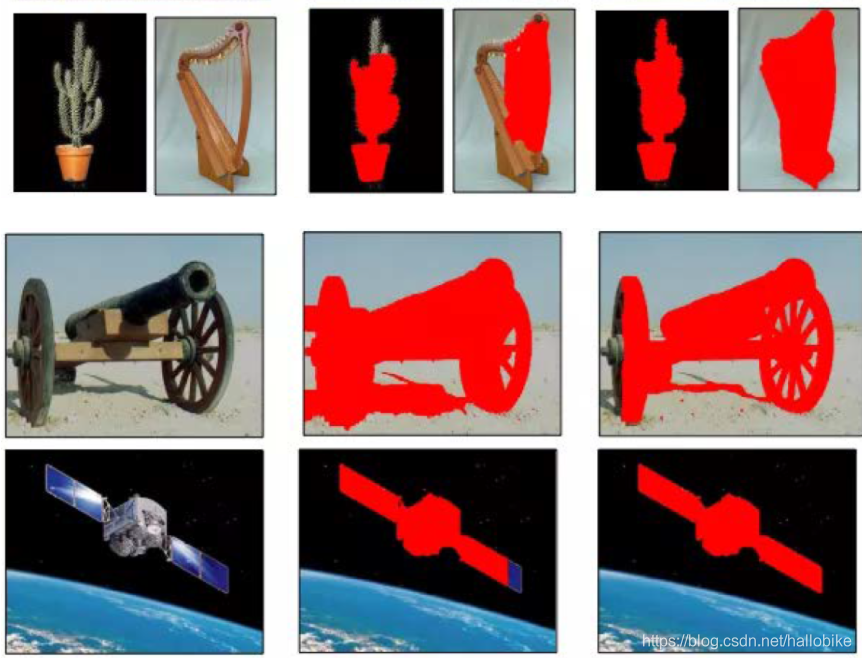
���һ���ǽ������ҵ��ı߽���ṩ��Grabcut�㷨��Grabcut�����ڷָ�ͼ��ij��÷���,�÷����Ὣ��
���DZ�����ǰ�������ݷֿ�������������ֱ��ʹ��OpenCV������Grabcut�����������Ľ��������ʾ��
![[����ͼƬת��ʧ��,Դվ�����з���������,���齫ͼƬ��������ֱ���ϴ�(img-I19jetnu-1603161896683)(en-resource://database/977:1)]](http://style.iis7.com/uploads/2021/09/21352965303.png)
���
���������Լ��㷽�����ڽ������һЩӰ�졣��һ�������Է������������ں���������ͼ����,�ں���������ͼ���в�����ڶ�����ʽ�Է�����ɷָ����������,�������ͼ��̫�����о���,����Щ����ͨ������ͼ������ಿ�ֶϿ����ӡ�
���������ַ����ָ����ͼ���ʾ�������
�����:
��1��C. Hsieh and M. Lee, ��Automatic trimap generation for digital image matting,�� 2013 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference, Kaohsiung, 2013, pp. 1�C5.
��2��Gupta, Vikas & Raman, Shanmuganathan. (2017). Automatic Trimap Generation for Image Matting.
Դ���ַ:https://github.com/TimChinenov/GraspPicture
cs