int __irq_domain_alloc_irqs(struct irq_domain *domain, int irq_base,
unsigned int nr_irqs, int node, void *arg,
bool realloc, const struct cpumask *affinity)
{
int i, ret, virq;
/* 下面这个函数会从系统中一个唯一的virq,其实就是全局变量allocated_irqs从低位到高位第一个为0的位的位号.
然后将allocated_irqs的第virq位置为1, 然后会为这个virq分配一个irq_desc, virq会存放到irq_desc的irq_data.irq中.
最后将这个irq_desc存放到irq_desc_tree中,以virq为key,函数irq_to_desc就是以virq为key,查询irq_desc_tree 迅速定位到irq_desc*/
virq = irq_domain_alloc_descs(irq_base, nr_irqs, 0, node,
affinity);
irq_domain_alloc_irq_data(domain, virq, nr_irqs);
......
ret = irq_domain_alloc_irqs_hierarchy(domain, virq, nr_irqs, arg);
......
for (i = 0; i < nr_irqs; i++)
// 将virq跟hwirq的映射关系存放到irq domain中,这样就可以通过hwirq在该irq_domain中快速找到virq
irq_domain_insert_irq(virq + i);
.....
return virq;
}
irq_domain_alloc_irq_data 会根据virq获得对应的irq_desc,然后将domain赋值给irq_desc->irq_data->domain.
irq_domain_alloc_irqs_recursive 这个函数会调用gic irq domain的domain->ops->alloc,即gic_irq_domain_alloc
下面分析irq_create_mapping,对于irq domain的ops中没有定义alloc的domain,会执行这个函数
? ---> irq_create_mapping 为hwirq分配virq,并存放映射到irq domain中
unsigned int irq_create_mapping(struct irq_domain *domain,
irq_hw_number_t hwirq)
{
struct device_node *of_node;
int virq;
......
of_node = irq_domain_get_of_node(domain);
/* Check if mapping already exists
如果映射已经存在,那么不需要映射,直接返回 */
virq = irq_find_mapping(domain, hwirq);
if (virq) {
pr_debug("-> existing mapping on virq %d\n", virq);
return virq;
}
/* Allocate a virtual interrupt number 分配虚拟中断号*/
virq = irq_domain_alloc_descs(-1, 1, hwirq, of_node_to_nid(of_node), NULL);
.....
if (irq_domain_associate(domain, virq, hwirq)) {//建立mapping
irq_free_desc(virq);
return 0;
}
.....
return virq;
}
至此,device node在转化为platform_device过程中的interrupts属性的处理就暂时分析完毕,后面会调用device_add()注册该platform_device,然后匹配到的platform_driver的probe就会被调用。
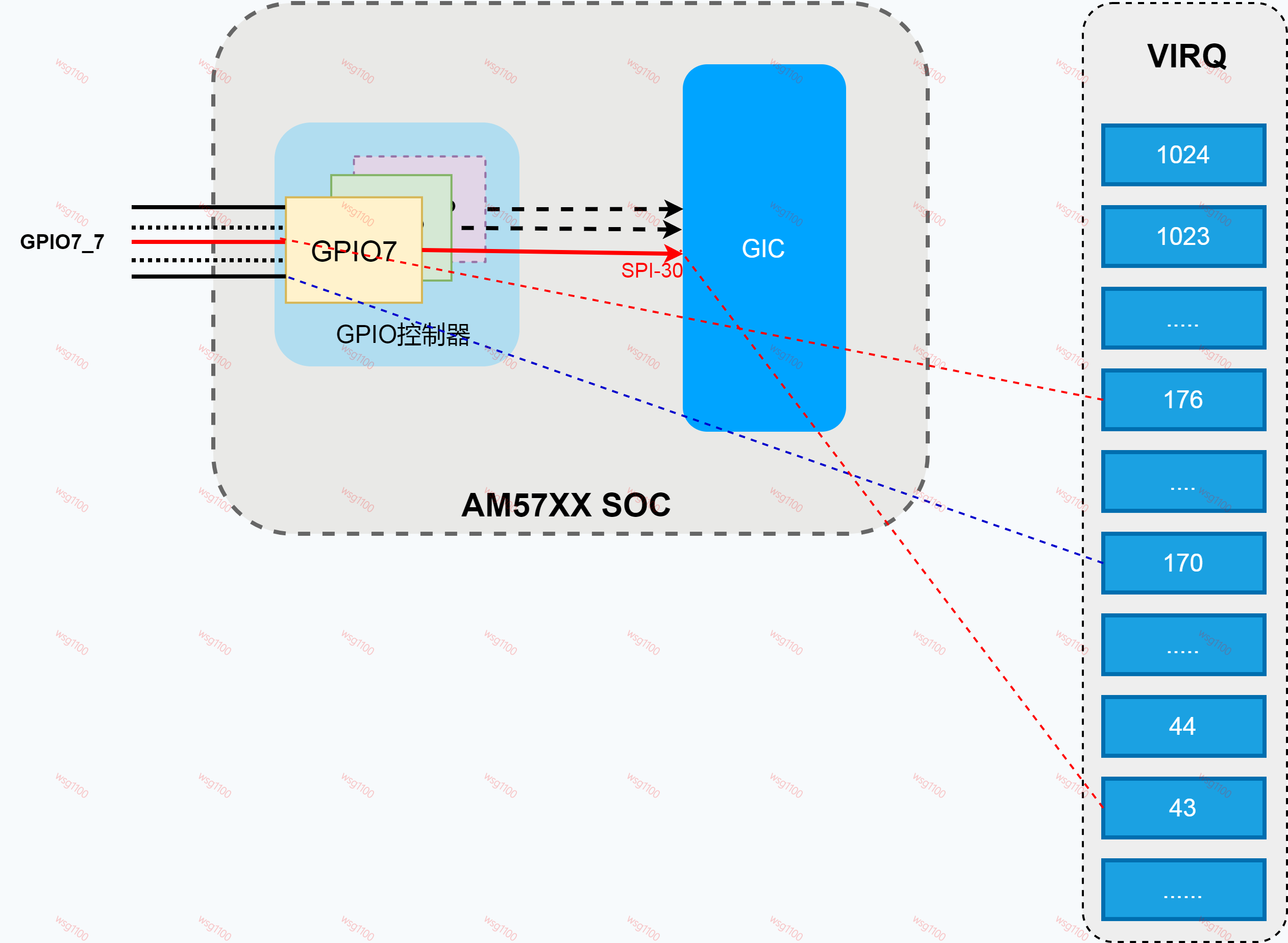
通过打印信息可知GPIO7的hwirq与virq的映射关系:
[19491.235350] virq is 43,hwirq is 30

需要关注的是 domain->ops->map(),该函数中户设置该中断的desc->handle_irq(),对于GIC来说,map函数为gic_irq_domain_map,SPI中断handle_irq()设置为handle_fasteoi_irq。
第三部分:platform_device注册添加

platform_driver的probe就会被调用。

第四部分 GPIO控制器驱动
相关代码:
drivers\gpio\gpio-omap.c
在gpio@48051000节点转化成的platform_device被注册的时候,omap_gpio_probe()会被调用。这个函数目前我们先只分析跟中断相关的。
static int omap_gpio_probe(struct platform_device *pdev)
{
struct device *dev = &pdev->dev;
struct device_node *node = dev->of_node;
const struct of_device_id *match;
const struct omap_gpio_platform_data *pdata;
struct resource *res;
struct gpio_bank *bank;
struct irq_chip *irqc;
int ret;
match = of_match_device(of_match_ptr(omap_gpio_match), dev);
......
pdata = match ? match->data : dev_get_platdata(dev);
......
bank = devm_kzalloc(dev, sizeof(struct gpio_bank), GFP_KERNEL);
......
/*irq_chip用于抽象该GPIO中断控制器*/
irqc = devm_kzalloc(dev, sizeof(*irqc), GFP_KERNEL);
......
irqc->irq_startup = omap_gpio_irq_startup,
irqc->irq_shutdown = omap_gpio_irq_shutdown,
irqc->irq_ack = omap_gpio_ack_irq,
irqc->irq_mask = omap_gpio_mask_irq,
irqc->irq_mask_ack = omap_gpio_mask_ack_irq,
irqc->irq_unmask = omap_gpio_unmask_irq,
irqc->irq_set_type = omap_gpio_irq_type,
irqc->irq_set_wake = omap_gpio_wake_enable,
irqc->irq_bus_lock = omap_gpio_irq_bus_lock,
irqc->irq_bus_sync_unlock = gpio_irq_bus_sync_unlock,
irqc->name = dev_name(&pdev->dev);
irqc->flags = IRQCHIP_MASK_ON_SUSPEND | IRQCHIP_PIPELINE_SAFE;
bank->irq = platform_get_irq(pdev, 0);/*该irq已经是虚拟的了 详见of_irq_to_resource*/
......
bank->chip.parent = dev;
bank->chip.owner = THIS_MODULE;
bank->dbck_flag = pdata->dbck_flag;
bank->stride = pdata->bank_stride;
bank->width = pdata->bank_width;/*该bank GPIO数*/
bank->is_mpuio = pdata->is_mpuio;
bank->non_wakeup_gpios = pdata->non_wakeup_gpios;
bank->regs = pdata->regs;
#ifdef CONFIG_OF_GPIO
bank->chip.of_node = of_node_get(node);
#endif
......
platform_set_drvdata(pdev, bank);
......
ret = omap_gpio_chip_init(bank, irqc);/*完成GPIO中断控制器注册*/
......
omap_gpio_show_rev(bank);
......
list_add_tail(&bank->node, &omap_gpio_list);
return 0;
}
需要注意的是,通过platform_get_irq(pdev, 0)获取该bank对应的中断时,已经是virq了,不是设备树里指定的GIC hwirq。
omap_gpio_chip_init为该bank注册GPIO中断控制器。
static int omap_gpio_chip_init(struct gpio_bank *bank, struct irq_chip *irqc)
{
struct gpio_irq_chip *irq;
static int gpio;
const char *label;
int irq_base = 0;
int ret;
/*GPIO操作回调函数*/
bank->chip.request = omap_gpio_request;
bank->chip.free = omap_gpio_free;
bank->chip.get_direction = omap_gpio_get_direction;
bank->chip.direction_input = omap_gpio_input;
bank->chip.get = omap_gpio_get;
bank->chip.get_multiple = omap_gpio_get_multiple;
bank->chip.direction_output = omap_gpio_output;
bank->chip.set_config = omap_gpio_set_config;
bank->chip.set = omap_gpio_set;
bank->chip.set_multiple = omap_gpio_set_multiple;
label = devm_kasprintf(bank->chip.parent, GFP_KERNEL, "gpio-%d-%d",
gpio, gpio + bank->width - 1);
bank->chip.label = label;
bank->chip.base = gpio;//该bank中的第一个gpio的逻辑gpio号
bank->chip.ngpio = bank->width;//该bank GPIO数
irq = &bank->chip.irq;
irq->chip = irqc; //设置该bank 的irq_chip
irq->handler = handle_bad_irq; //该中断控制器默认中断处理函数
irq->default_type = IRQ_TYPE_NONE; //中断默认触发方式
irq->num_parents = 1;
irq->parents = &bank->irq;
irq->first = irq_base;//该GPIO中断控制器的起始中断号0
ret = gpiochip_add_data(&bank->chip, bank);
// 这里的d->irq是节点gpio@48051000的interrupts属性所映射到的virq,对应的hwirq就是SPI-30
// 这里申请了中断,在中断处理函数omap_gpio_irq_handler中会获得发生中断的引脚,转化为该GPIO控制器的hwirq,再进行一步处理
ret = devm_request_irq(bank->chip.parent, bank->irq,
omap_gpio_irq_handler,
0, dev_name(bank->chip.parent), bank);
ank->width;
return ret;
}
gpiochip_add_data
#define gpiochip_add_data(chip, data) gpiochip_add_data_with_key(chip, data, NULL, NULL)
int gpiochip_add_data_with_key(struct gpio_chip *chip, void *data,
struct lock_class_key *lock_key,
struct lock_class_key *request_key)
{
unsigned long flags;
int status = 0;
unsigned i;
int base = chip->base;
struct gpio_device *gdev;
// 每一个bank都都应一个唯一的gpio_device和gpio_chip
gdev = kzalloc(sizeof(*gdev), GFP_KERNEL);
gdev->dev.bus = &gpio_bus_type;
gdev->chip = chip;
chip->gpiodev = gdev;
if (chip->parent) {
gdev->dev.parent = chip->parent;
gdev->dev.of_node = chip->parent->of_node;
}
#ifdef CONFIG_OF_GPIO
/* If the gpiochip has an assigned OF node this takes precedence */
if (chip->of_node)
gdev->dev.of_node = chip->of_node;
else
chip->of_node = gdev->dev.of_node;
#endif
// 分配一个唯一的id
gdev->id = ida_simple_get(&gpio_ida, 0, 0, GFP_KERNEL);
dev_set_name(&gdev->dev, "gpiochip%d", gdev->id);
device_initialize(&gdev->dev);
dev_set_drvdata(&gdev->dev, gdev);
if (chip->parent && chip->parent->driver)
gdev->owner = chip->parent->driver->owner;
else if (chip->owner)
/* TODO: remove chip->owner */
gdev->owner = chip->owner;
else
gdev->owner = THIS_MODULE;
// 为这个chip下的每一个gpio都要分配一个gpio_desc结构体
gdev->descs = kcalloc(chip->ngpio, sizeof(gdev->descs[0]), GFP_KERNEL);
gdev->label = kstrdup_const(chip->label ?: "unknown", GFP_KERNEL);
// 这个chip中含有的gpio的个数
gdev->ngpio = chip->ngpio;
//gdev->data代表这个bank
gdev->data = data;
spin_lock_irqsave(&gpio_lock, flags);
// base表示的是这个bank在系统中的逻辑gpio号
gdev->base = base;
// 将这个bank对应的gpio_device添加到全局链表gpio_devices中
// 在添加的时候会根据gdev->base和ngpio在gpio_devices链表中找到合适的位置
status = gpiodev_add_to_list(gdev);
spin_unlock_irqrestore(&gpio_lock, flags);
/*为每个GPIO分配gpio_desc,建立与gdev的联系*/
for (i = 0; i < chip->ngpio; i++) {
struct gpio_desc *desc = &gdev->descs[i];
desc->gdev = gdev;
desc->flags = !chip->direction_input ? (1 << FLAG_IS_OUT) : 0;
}
// 默认这个chip下的所有gpio都是可以产生中断
status = gpiochip_irqchip_init_valid_mask(chip);
status = gpiochip_init_valid_mask(chip);
/*为该bank添加irq_chip,并创建一个irq_domain
只是创建了irq domain,还没有存放任何中断映射关系,在需要的时候才会映射。*/
status = gpiochip_add_irqchip(chip, lock_key, request_key);
status = of_gpiochip_add(chip);
acpi_gpiochip_add(chip);
machine_gpiochip_add(chip);
if (gpiolib_initialized) {
status = gpiochip_setup_dev(gdev);
}
return 0;
}
---> of_gpiochip_add(struct gpio_chip *chip)
int of_gpiochip_add(struct gpio_chip *chip)
{
int status;
......
if (!chip->of_xlate) {
/*pio_chip的of_gpio_n_cells被赋值为2,表示引用一个gpio资源需要两个参数,
负责解析这两个参数函数以的of_xlate函数为of_gpio_simple_xlate,
其中第一个参数表示gpio号(在对应的bank中),第二个表示flag*/
chip->of_gpio_n_cells = 2;
chip->of_xlate = of_gpio_simple_xlate;
}
这里需要看一下of_gpio_simple_xlate的实现,这个在下面的分析中会被回调.
int of_gpio_simple_xlate(struct gpio_chip *gc,
const struct of_phandle_args *gpiospec, u32 *flags)
{
......
if (flags) // 第二个参数表示的是flag
*flags = gpiospec->args[1];
// 第一个参数表示的是gpio号
return gpiospec->args[0];
}
下看创建domain流程:
static int gpiochip_add_irqchip(struct gpio_chip *gpiochip,
struct lock_class_key *lock_key,
struct lock_class_key *request_key)
{
struct irq_chip *irqchip = gpiochip->irq.chip;
const struct irq_domain_ops *ops;
struct device_node *np;
unsigned int type;
unsigned int i;
......
np = gpiochip->gpiodev->dev.of_node;
type = gpiochip->irq.default_type; //默认触发类型
.....
gpiochip->to_irq = gpiochip_to_irq; /*驱动request irq时调用*/
gpiochip->irq.default_type = type;
gpiochip->irq.lock_key = lock_key;
gpiochip->irq.request_key = request_key;
if (gpiochip->irq.domain_ops)
ops = gpiochip->irq.domain_ops;
else
ops = &gpiochip_domain_ops;
/* 创建一个linear irq domain,从这里看到,每一个bank都会有一个irq domain,ngpio是这个bank含有的gpio的个数,也是这个irq domain支持的中断的个数*/
gpiochip->irq.domain = irq_domain_add_simple(np, gpiochip->ngpio,
gpiochip->irq.first,
ops, gpiochip);
......
return 0;
}
上面也只是创建了irq domain,还没有存放任何中断映射关系,在需要的时候才会映射。
该irq domain的irq_domain_ops为gpiochip_domain_ops;
static const struct irq_domain_ops gpiochip_domain_ops = {
.map = gpiochip_irq_map,
.unmap = gpiochip_irq_unmap,
/* Virtually all GPIO irqchips are twocell:ed */
.xlate = irq_domain_xlate_twocell,
};
gpio7这个中断在GIC级的处理函数注册为omap_gpio_irq_handler;
ret = devm_request_irq(bank->chip.parent, bank->irq,
omap_gpio_irq_handler,
0, dev_name(bank->chip.parent), bank);
为bank->irq创建一个action,设置该action–>handler为omap_gpio_irq_handler,将该action添加到bank->irq对应的irq_desc的actions链表。
第五部分 引用GPIO中断的节点的解析
从上面的分析中我们知道了如下几点:
-
每一个bank都对应一个gpio_chip和gpio_device
-
这个bank下的每一个gpio都会对应一个唯一的gpio_desc结构体,这些结构提的首地址存放在gpio_device的desc中